|
|
|
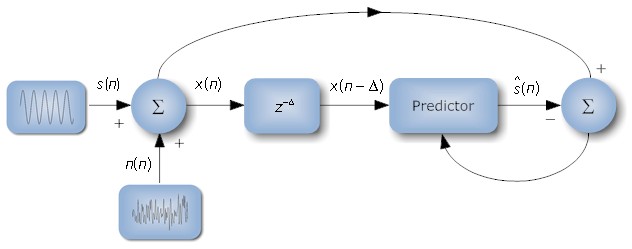
Example: Noise Cancellation using the LMS Algorithm Adaptive filters are required when it is necessary for a digital filter's characteristics to be variable, adapting to changing signal characteristics. Such filters can be classed as 'self designing' in that they rely upon a recursive mathematical algorithm, that allow them to perform satisfactorily in an environment where complete knowledge of the signal of interest (desired signal) and noise is not known. As a consequence, adaptive filters, such as the LMS (least mean squared) algorithm have been used in many real world applications such as biomedical signal enhancement, system identification and noise cancellation. The following example demonstrates the enhancement of a 100Hz signal buried in band limited white noise, by virtue of a 30th order FIR LMS filter. Adaptive line enhancement (ALE)
Analyzing the block diagram a little further, notice how the input to
the adaptive filter is actually
|
||||
| Home | DSP Algorithms | Hardware Design | Radar Solutions | Disclaimer | Contact us |
|
|
|
| Copyright © Advanced Solutions Nederland BV, 2006-2017. All Rights Reserved. | |||