Hoewel het ontwerp van FIR-filters met lineaire fase een eenvoudige opgave is, geldt dit zeker niet voor IIR-filters die meestal een zeer niet-lineaire faserespons hebben, vooral rond de afsnijfrequenties van het filter. Dit artikel bespreekt waarvoor lineairde eigenschappen die nodig zijn om een digitaal filter een lineaire fase te laten hebben en hoe de passband fase van een IIR filter kan worden aangepast om een lineaire fase te bereiken met behulp van all-pass equalisatie filters.
Waarvoor zijn lineaire fase filters bedoeld?
Digitale filters met lineaire fase hebben het voordeel dat ze alle frequentiecomponenten met dezelfde hoeveelheid vertragen, d.w.z. dat ze de faseverhoudingen van het ingangssignaal behouden. Dit behoud van fase betekent dat het gefilterde signaal de vorm van het oorspronkelijke ingangssignaal behoudt. Deze eigenschap is essentieel voor audiotoepassingen, omdat de signaalvorm van het grootste belang is voor het behoud van de high fidelity in het gefilterde geluid. Nog een ander toepassingsgebied waar dit is vereist, is de ECG biomedische golfvormanalyse, omdat eventuele artefacten die door het filter worden geïntroduceerd, verkeerd kunnen worden geïnterpreteerd als hartafwijkingen.
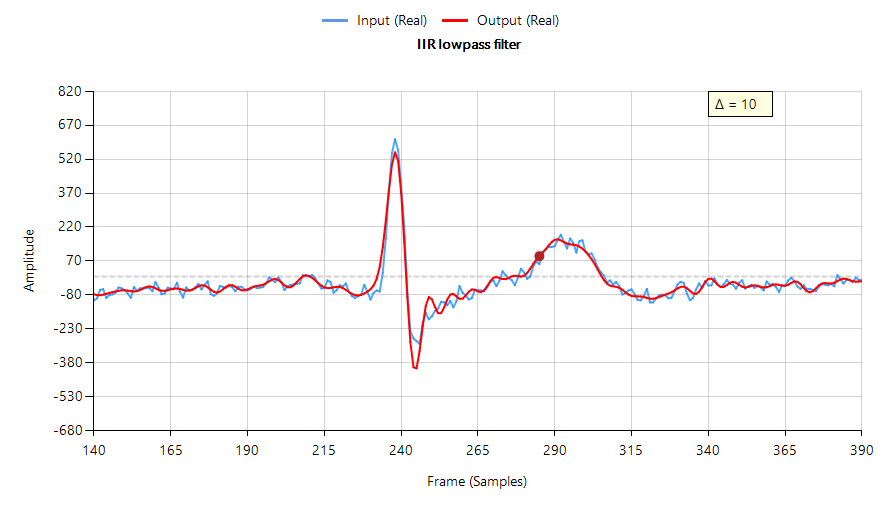
De volgende grafiek toont de filterprestaties van een Chebyshev type I lowpass IIR op ECG-gegevens – invoergolfvorm (weergegeven in blauw) verschoven door 10 samples (\(\small \Delta=10\)) om de groepsvertraging van het filter ongeveer te compenseren. Merk op dat het gefilterde signaal (in rood weergegeven) de oscillaties rond de ECG-piek heeft verzwakt, verbreed en toegevoegd, wat ongewenst is.
Om een digitaal filter een lineaire fase te laten hebben, moet de impulsrespons van een digitaal filter een conjugaat-even of conjugaat-odd-symmetrie hebben rond het midden van het filter. Dit is gemakkelijk te zien voor een FIR-filter,
Met het volgende constraint op zijn coëfficiënten
welke leidt tot
Naar Eqn. 3 kijkend, zien we dat wortels (nullen) van \(\small H(z)\) ook de nullen moeten zijn van \(\small H^\ast (1/z^\ast)\). Dit betekent dat de wortels van \(\small H(z)\) moet voorkomen in geconjugeerde wederzijdse paren. Bijvoorbeeld wanneer \(\small z_k\) een nul is van \(\small H(z)\), dan moet \(\small H^\ast (1/z^\ast)\) ook een nul zijn.
Waarom hebben IIR filters geen lineaire fase?
Van een digitaal filter wordt gezegd dat het een gebonden ingang, gebonden uitgang stabiel (oftewel: BIBO (Bounded Input, Boundend Output) stabiel), als elke gebonden ingang aanleiding geeft tot een gebonden uitgang. Alle IIR-filters hebben ofwel polen ofwel beide polen en nullen, en moeten BIBO stabiel zijn, d.w.z.
\(\displaystyle \sum_{k=0}^{\infty}\left|h(k)\right|<\infty \tag{4}\)
Hierbij is \(\small h(k)\) de impulsrespons van het filter. Bij het analyseren van Eqn. 4 moet duidelijk zijn dat aan het BIBO-stabiliteitscriterium alleen wordt voldaan als de polen van het systeem binnen de eenheidscirkel liggen, aangezien de eenheidscirkel in het ROC (gebied van convergentie) van het systeem moet worden opgenomen. Het is dus voldoende om te zeggen dat een begrensd ingangssignaal altijd een begrensd uitgangssignaal zal produceren als alle polen binnen de eenheidscirkel liggen.
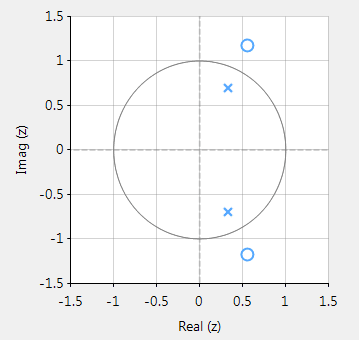
De nullen daarentegen worden niet beperkt door deze eis en kunnen daardoor overal op het z-vlak liggen, omdat ze niet direct van invloed zijn op de stabiliteit van het systeem. Daarom kan een systeemstabiliteitsanalyse worden uitgevoerd door eerst de wortels van de transferfunctie te berekenen (d.w.z. de wortels van de teller- en noemerpolynomialen) en vervolgens de corresponderende polen en nullen op het z-vlak te plotten.
Door de ontwikkelde logica toe te passen op de polen van een IIR-filter komen we nu tot een zeer belangrijke conclusie waarom IIR-filters geen lineaire fase kunnen hebben..
Een BIBO stabiel filter moet zijn polen binnen de eenheidscirkel hebben, en als zodanig zou een IIR geconjugeerde tegengestelde polen buiten de eenheidscirkel nodig hebben om een lineaire fase te krijgen, waardoor het BIBO onstabiel wordt.
Op basis van deze uitspraak lijkt het niet mogelijk om een IIR te ontwerpen met een lineaire fase. Echter, zoals hieronder besproken, kunnen fase-equalisatiefilters worden gebruikt om de passband-fase respons te lineariseren.
Fase linearisatie met all-pass filters
All-pass fase linearisatiefilters (equalisers) zijn een beproefde methode om de faserespons van een filter te wijzigen zonder de magnitude ervan te beïnvloeden. Een tweede orde (Biquad) all-pass filter wordt gedefinieerd als:
Hierbij is \(\small f_c\) is de centre frequency, \(\small r\) de radius van de polen en \(\small f_s\) de sampling frequency. Merk op hoe de teller- en noemercoëfficiënten als spiegelend aan elkaar zijn gerangschikt. De eigenschap van het spiegelbeeld is wat de all-pass filter zijn gewenste eigenschap geeft, namelijk de ontwerper in staat stellen om de faserespons te veranderen terwijl de magnituderespons constant of vlak blijft over het volledige frequentiespectrum.
Cascadering van een APF (all-pass filter) equalisatie cascade (bestaande uit meerdere APF’s) met een IIR-filter, het basisidee is dat we alleen de fasereactie het passbandgebied moeten lineariseren. De andere gebieden, zoals de overgangsband en de stopband, kunnen worden genegeerd, aangezien eventuele niet-lineairiteiten in deze gebieden van weinig belang zijn voor het totale filterresultaat.
De uitdaging
De APF-cascade klinkt als een ideaal compromis voor deze uitdaging, maar in werkelijkheid is een aanzienlijke hoeveelheid tijd en een zeer zorgvuldige afstemming van de APF-posities nodig om een aanvaardbaar resultaat te bereiken. Elke APF heeft twee variabelen: \(\small f_c\) en \(\small r\) die geoptimaliseerd moeten worden, wat de oplossing bemoeilijkt. Dit wordt verder gecompliceerd door het feit dat hoe meer APF-fasen aan de cascade worden toegevoegd, hoe hoger de totale groepsvertraging (latentie) van het filter wordt. Dit laatste kan problematisch worden voor snelle real-time closed loop controlesystemen die afhankelijk zijn van de lage latency eigenschap van een IIR.
Ondanks deze uitdagingen is de APF-equalizer een goed compromis voor het lineariseren van de kenmerken van een IIR-doorgangsfase.
De APF equaliser
ASN Filter Designer biedt ontwerpers een zeer eenvoudig te gebruiken grafische alle-fase equalizer interface voor het lineariseren van de passband fase van IIR filters. Zoals hieronder te zien is, is de interface zeer intuïtief en stelt het ontwerpers in staat om APF-filters snel te plaatsen en te fine-tunen met de muis. De tool berekent automatisch \(\small f_c\) en \(\small r\), gebaseerd op de markerpositie.
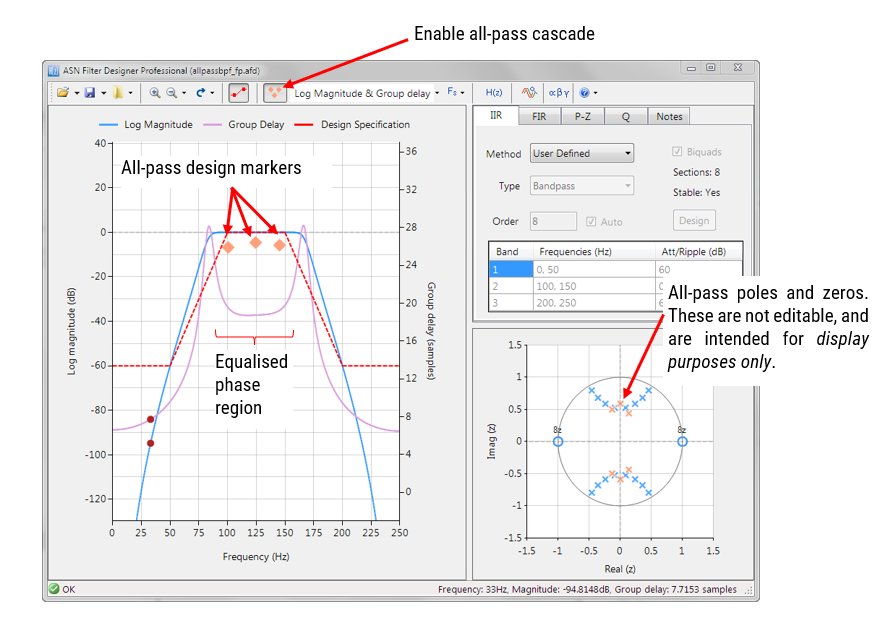
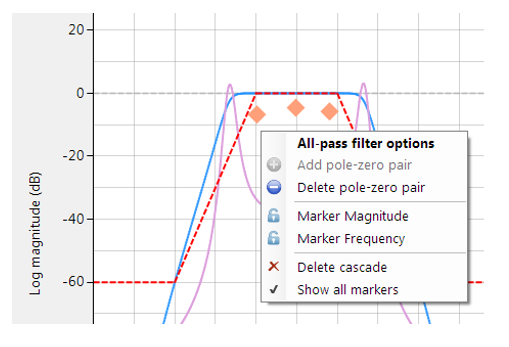
Door met de rechtermuisknop te klikken op de frequentieresponskaart of op een bestaande all-pass design marker wordt een optiemenu weergegeven, zoals links afgebeeld.
U kunt maximaal 10 biquads toevoegen (alleen professionele versie).
Een IIR met lineaire passband fase
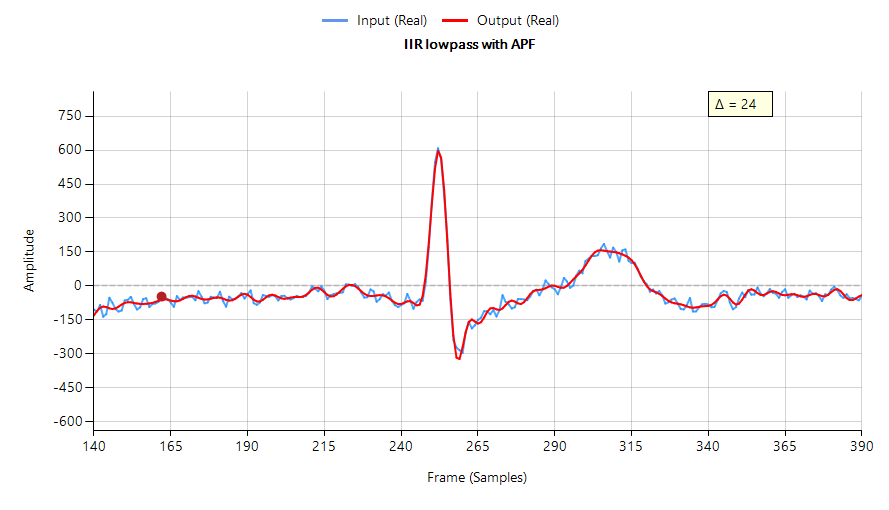
Door een equalizer te ontwerpen die bestaat uit drie APF-paren, en deze te cascaderen met het Chebyshev-filter van figuur 1, verkrijgen we een filtergolfvorm die een veel scherpere piek heeft met minder demping en oscillatie dan het oorspronkelijke IIR – zie hieronder. Deze verbetering gaat echter ten koste van drie extra Biquad-filters (de APF-cascade) en een verhoogde groepsvertraging, die nu is opgelopen tot 24 samples ten opzichte van de oorspronkelijke 10 samples.
(minimale fasevervorming)
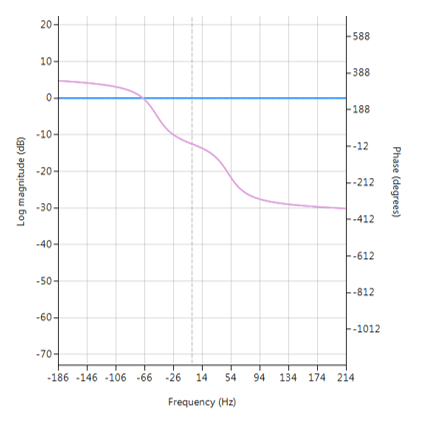
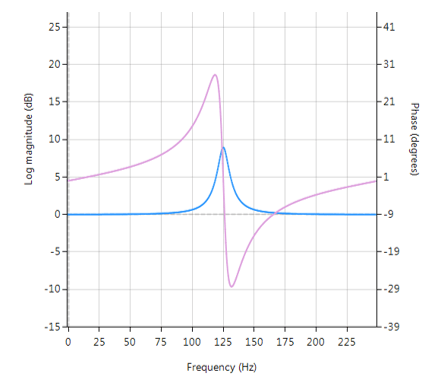
De frequentierespons van zowel het oorspronkelijke IIR als het geequaliseerde IIR worden hieronder weergegeven, waarbij de groepsvertraging (weergegeven in paars) de gemiddelde vertraging van het filter is en een eenvoudiger manier is om de lineariteit te beoordelen.
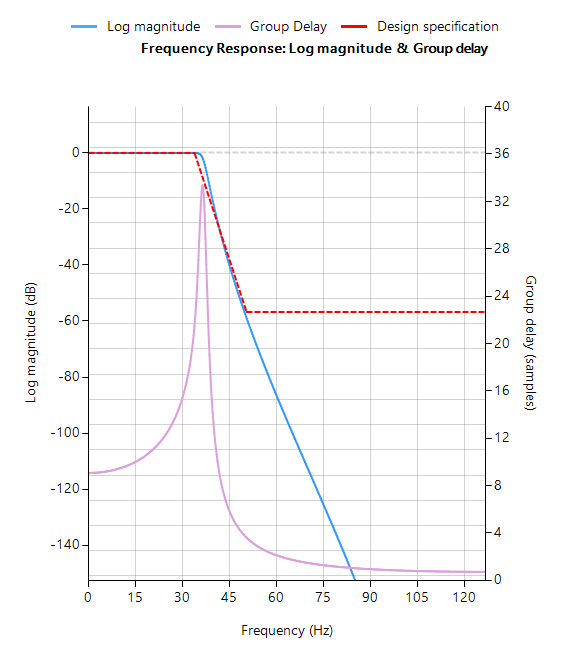
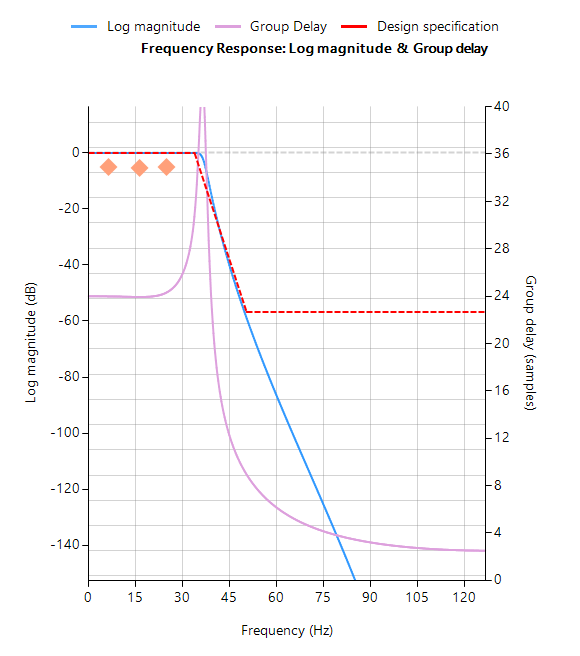
Merk op dat de groepsvertraging van de geëgaliseerde IIR passband (rechts afgebeeld) bijna vlak is, wat bevestigt dat de fase inderdaad lineair is.
Automatische code generatie naar Arm processor cores via CMSIS-DSP
De automatische codegeneratie-engine van de ASN Filter Designer maakt het mogelijk om een ontworpen filter te exporteren naar Cortex-M Arm-gebaseerde processoren via het CMSIS-DSP software raamwerk. De ingebouwde analyse- en helpfuncties van de tool helpen de ontwerper bij het succesvol configureren van het ontwerp voor implementatie.
Voordat de code wordt gegenereerd, moeten de IIR- en equalisatiefilters (d.w.z. H1- en Heq-filters) eerst opnieuw worden geoptimaliseerd (samengevoegd) tot een H1-filter (hoofdfilter) structuur voor implementatie. Het optiemenu is te vinden onder de P-Z tab in de hoofd UI.

Alle ontwerpen van IIR-filters met floating point moeten gebaseerd zijn op Single Precision arithmetic en ofwel een Direct Form I of Direct Form II getransponeerde filterstructuur. De Direct Form II getransponeerde structuur wordt geadviseerd voor floating point implementatie vanwege de hogere numerieke nauwkeurigheid.
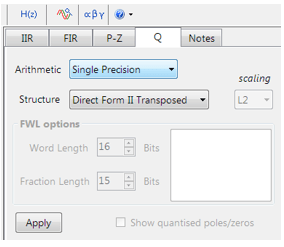
De instellingen voor de kwantiteit en de filterstructuur zijn te vinden onder het tabblad Q (zoals links afgebeeld). Door Arithmetic op Single Precision en Structure op Direct Form II Transposed te zetten en vervolgens op Apply te klikken, wordt de IIR voor het CMSIS-DSP software raamwerk geconficureerd.
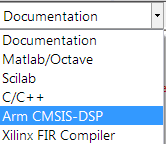
Selecteer het Arm CMSIS-DSP raamwerk in het selectievakje in het filteroverzichtsvenster:
De automatisch gegenereerde C-code op basis van het CMSIS-DSP framework voor directe implementatie op een Arm-gebaseerde Cortex-M processor is hieronder weergegeven:
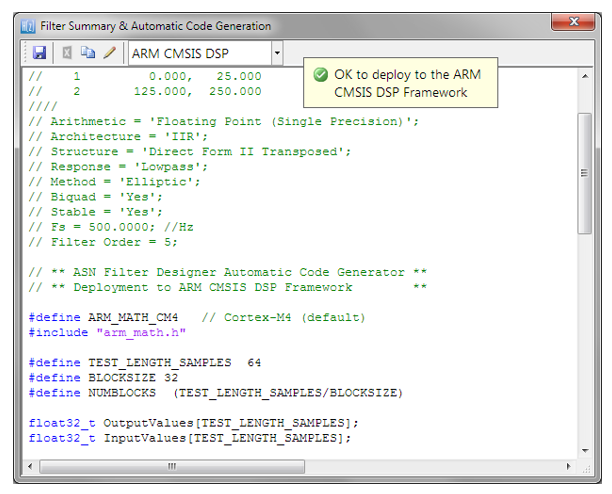
De automatische codegenerator van de ASN Filter Designer genereert alle initialisatiecode, schaling en datastructuren die nodig zijn om het gelineariseerde filter IIR-filter te implementeren via de CMSIS-DSP-bibliotheek van Arm.
Wat hebben we geleerd?
De wortels van een lineaire fase digitaal filter moeten in geconjugeerde wederzijdse paren voorkomen. Hoewel dit geen probleem is voor een FIR-filter, wordt het voor een IIR-filter onhaalbaar, omdat de polen zowel binnen als buiten de eenheidscirkel zouden moeten liggen, waardoor het filter BIBO onstabiel wordt.
De passband fase-respons van een IIR-filter kan worden gelineariseerd met behulp van een APF-equalisatiecascade. De ASN Filter Designer biedt ontwerpers alles wat ze nodig hebben via een zeer eenvoudig te gebruiken, grafische all-pass fase equalizer interface, om met behulp van de muis een geschikte APF-cascade te ontwerpen!
Het gelineariseerde IIR-filter kan worden geëxporteerd via de automatische codegenerator met behulp van de geoptimaliseerde CMSIS-DSP-bibliotheekfuncties van Arm voor gebruik op elke Cortex-M-microcontroller.