Alle Sensoren erzeugen Messdaten. Diese Messdaten enthalten zwei Arten von Komponenten:
- Gewünschte Komponenten, d. h. Informationen, die wir wissen wollen
- Unerwünschte Komponenten, Messrauschen, 50/60Hz-Stromleitungsstörungen, Störungen usw. – was wir nicht wissen wollen
Unerwünschte Komponenten beeinträchtigen die Systemleistung und müssen herausgenommen werden.
Die Herausforderung für jeden Konstrukteur besteht also zunächst darin, herauszufinden, welche Aspekte der Daten wir behalten wollen. Das heißt “die erwünschten Komponenten”, und was wir herausfiltern müssen, die so genannten “unerwünschten Komponenten”. Nachdem wir festgestellt haben, was herausgefiltert werden muss, stellt sich die Frage, in welchem Bereich wir dieses Problem angehen: im analogen oder im digitalen Bereich? Jede Domäne hat ihre Vor- und Nachteile, wie wir jetzt anhand einer praktischen klassischen Sensormessung mit einer Kraftmesszelle diskutieren werden.
Kraftmesszelle analog
Eine klassische Sensormessung mit einer Kraftmesszelle ist unten dargestellt.
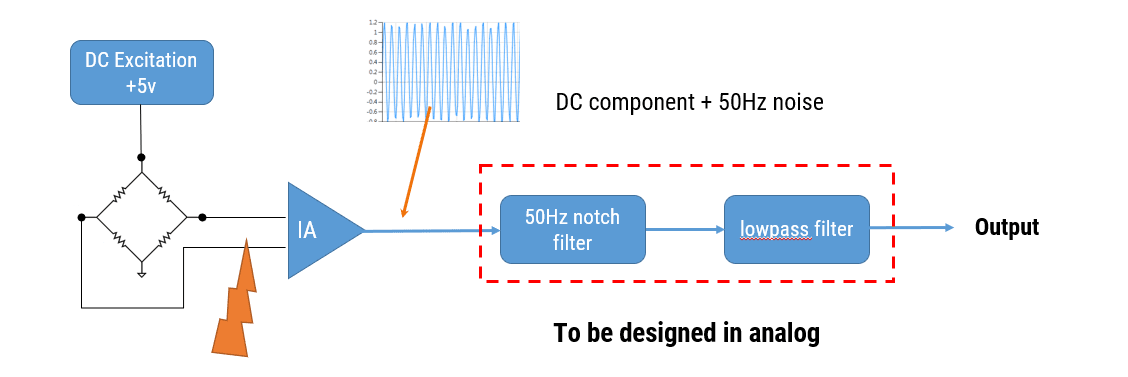
Ein Blick auf den Hardwareaufbau zeigt, dass die Kraftmesszelle durch eine Gleichstromerregerspannung erregt wird. Die allgemeine Idee ist, dass die differentielle Brückenspannung des Sensors durch den Instrumentenverstärker (IA) verstärkt wird, wenn eine Spannung angelegt wird.
Für diejenigen unter Ihnen, die mit dieser Art von Technologie nicht vertraut sind, ist eine Kraftmesszelle ein Dehnungsmesssensor, der aus 4 Dehnungsmessstreifen besteht und auch als Wheatstone-Brücke bezeichnet wird, daher die Bezeichnung Brückensensor.
Wenn wir die Signale im Schaltplan analysieren, sehen wir, dass die Differenzspannung durch 2 Filter geleitet wird, um Netzstörungen zu beseitigen und das Messrauschen zu reduzieren.
Was sind die Herausforderungen?
Der Instrumentenverstärker (IA) hat hochohmige Eingänge, so dass EMI-Filter (elektromagnetische Störungen) leicht an die Eingänge angeschlossen werden können. Fehlanpassungen bei diesen Filtern verschlechtern jedoch im Allgemeinen das Gleichtaktunterdrückungsverhältnis des Instrumentenverstärkers, was unerwünscht ist.
Der Instrumentenverstärker hat in der Regel eine hohe Verstärkung (100 ist recht typisch), so dass jede unerwünschte Differenzspannung an den Eingängen verstärkt wird. Bei den Filtern hängt die Kerbentiefe des Filters zur Unterdrückung von Stromleitungen (50Hz/60Hz) von den Komponententoleranzen ab und variiert im Laufe der Zeit und mit der Temperatur… Dies ist problematisch, wie wir im folgenden Abschnitt erörtern werden.
Schließlich erfordern alle analogen Filter ein sorgfältiges PCB-Layout und beanspruchen wertvollen Platz auf der Leiterplatte, was bei vielen modernen Geräten unerwünscht ist.
Loadcell digital – ist digital besser?
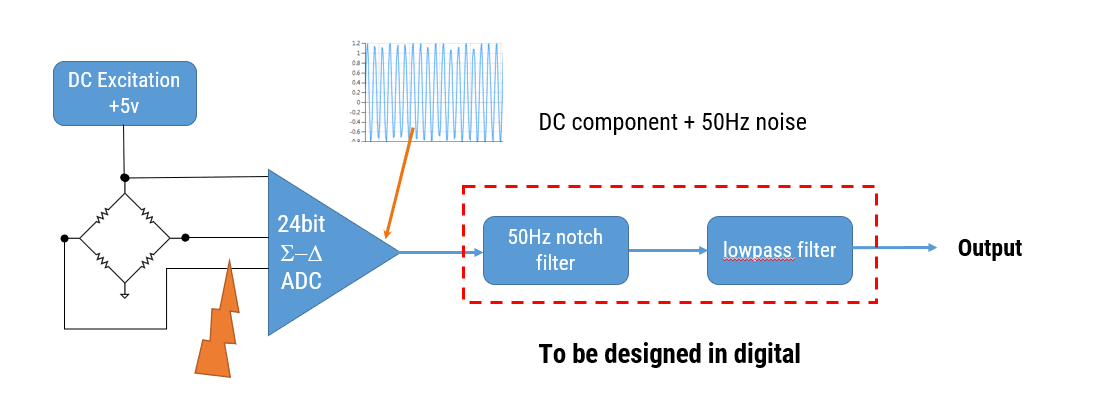
Wenn wir den Instrumentenverstärker durch einen 24-Bit-Sigma-Delta-ADC (Analog-Digital-Wandler) ersetzen, vereinfachen wir die Schaltung – obwohl viele ADCs keine hohe Impedanz an ihren Eingängen vertragen, was für ein gutes RFI-Filterdesign problematisch sein kann.
Einige Sigma-Delta-Bausteine haben jedoch einen eingebauten 50/60Hz-Sperrfilter, der die Filteranforderungen vereinfacht. Obwohl diese Bausteine teurer sind und die Wahl der Abtastfrequenz begrenzt ist, können sie für einige Anwendungen gut genug sein.
ASP vs DSP
Welcher Bereich eignet sich also am besten für die Lösung unserer Messaufgabe, d. h. verwenden wir analoge Signalverarbeitung (ASP) oder digitale Signalverarbeitung (DSP)? Um diese Frage objektiv beantworten zu können, müssen wir zunächst die Vor- und Nachteile der einzelnen Bereiche aufschlüsseln.
Analoge Filter
Schauen wir uns zunächst eine Implementierung mit ASP an.
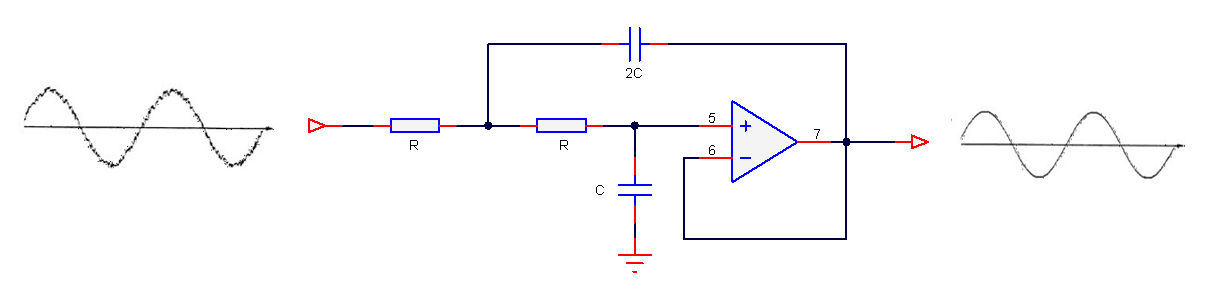
Der offensichtlichste Vorteil ist, dass analoge Filter eine hervorragende Auflösung haben, da es keine “Anzahl von Bits” zu berücksichtigen gibt. Analoge Filter haben gute EMV-Eigenschaften, da es kein takterzeugendes Rauschen gibt. Es gibt keine Aliasing-Effekte, was sicherlich auf die einfacheren Operationsverstärker zutrifft, die keine ausgeklügelten Zerhackungs- oder Autokalibrierungsschaltungen eingebaut haben, und analoge Designs können billig sein, was für kostenempfindliche Anwendungen großartig ist.
Klingt gut, aber was ist die schlechte Nachricht?
Analoge Filter haben eine Reihe von Nachteilen, die die Filterleistung beeinträchtigen, z. B. die Alterung der Bauteile, Temperaturdrift und Bauteiltoleranz. Außerdem erfordert eine gute Leistung gute Fähigkeiten im Analogdesign und ein gutes PCB-Layout, was auf dem heutigen Markt schwer zu finden ist.
Ein großer Minuspunkt ist, dass der Frequenzgang des Filters fest bleibt, d. h. ein Butterworth-Filter wird immer ein Butterworth-Filter bleiben – jede Änderung des Frequenzgangs würde einen physischen Austausch von Komponenten auf der Leiterplatte erfordern – nicht ideal!
Digitale Filter
Schauen wir uns nun eine Implementierung mit DSP an.

Der erste Eindruck ist, dass eine digitale Lösung komplizierter ist, wie oben bei den fünf Bausteinen zu sehen ist. Digitale Filter haben jedoch eine hohe Wiederholbarkeit der Eigenschaften, und nehmen wir als Beispiel an, dass Sie nach der Optimierung Ihres Filterentwurfs 1000 Messmodule herstellen möchten. Mit einer digitalen Lösung können Sie sicher sein, dass die Leistung Ihres Filters in allen Modulen identisch sein wird. Bei einer analogen Lösung ist dies sicherlich nicht der Fall, da Bauteiltoleranz, Bauteilalterung und Temperaturdrift dazu führen, dass der Filter jedes Moduls seine eigenen Eigenschaften hat.
Digitale Filter sind anpassungsfähig und flexibel. Wir können einen Filter mit einem beliebigen Frequenzgang entwerfen und implementieren, ihn einsetzen und dann die Filterkoeffizienten aktualisieren, ohne etwas auf der Leiterplatte zu ändern!
Außerdem ist es einfach, Filter mit linearer Phase und bei sehr niedrigen Abtastfrequenzen zu entwickeln – zwei Dinge, die bei analogen Filtern schwierig sind.
Klingt gut, aber was ist die schlechte Nachricht?
Die Auswirkung von Aliasing und bei Festkomma-Designs die endliche Wortlänge müssen berücksichtigt werden, einschließlich der Begrenzung des ADC und DAC. Da es eine Taktquelle gibt, werden digitale Designs mehr EMI erzeugen als analoge Filter.
Schlussfolgerung
Bei der Entwicklung moderner IoT-Sensormessanwendungen bieten digitale Filter im Vergleich zu ihren analogen Gegenstücken ein höheres Maß an Designflexibilität und eine hohe Wiederholbarkeit der Eigenschaften.
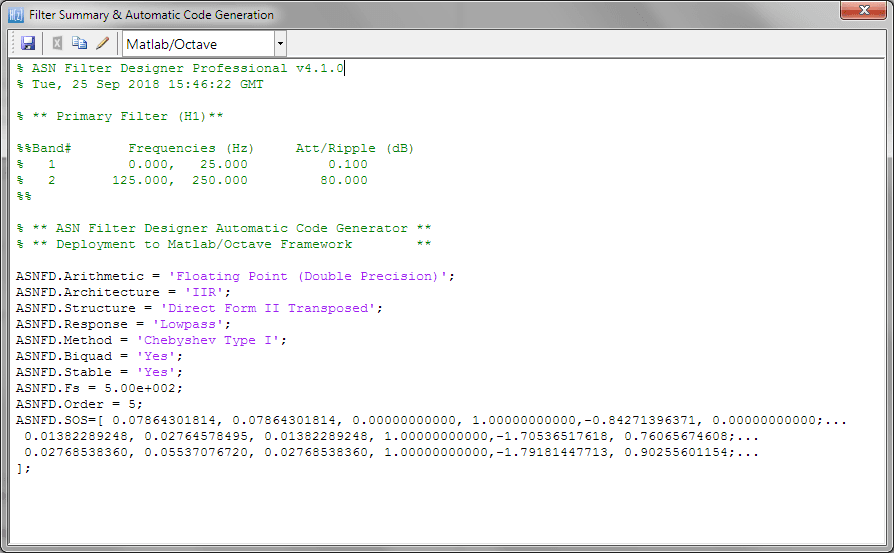
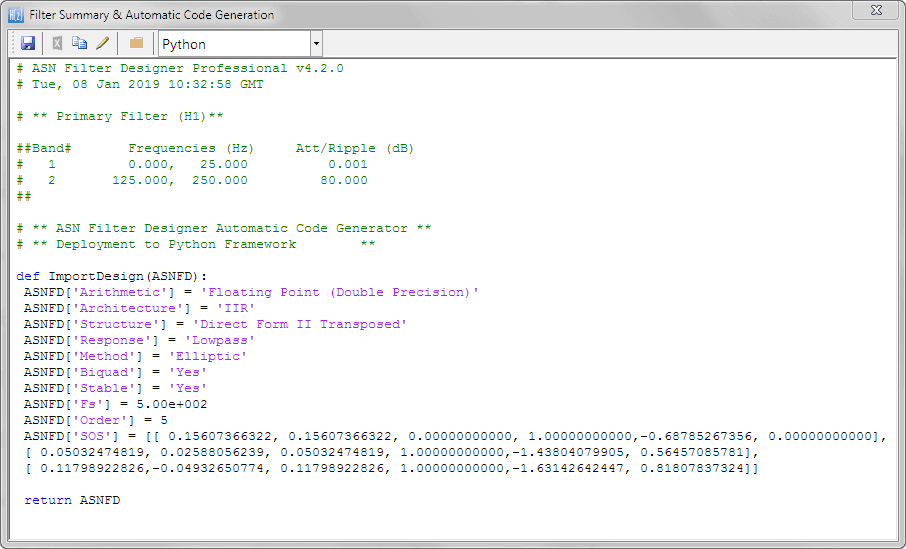
Mit dem Aufkommen moderner Prozessortechnologie und Design-Tools werden schätzungsweise 80 % der intelligenten IoT-Sensorgeräte derzeit mit digitalen Bausteinen, wie der Cortex-M-Familie von Arm, eingesetzt. Der Arm Cortex-M4 ist bei Hunderten von Siliziumherstellern sehr beliebt, da er DSP-Funktionen bietet, die sonst nur in teureren DSPs zu finden sind. Die Implementierung wird durch die starke Partnerschaft von ASN mit Arm weiter vereinfacht, die gemeinsam ein reichhaltiges Angebot an einfach zu bedienenden Filter-Design-Tools und ein filter design tooling and a kostenloses DSP-Software-Framework (CMSIS-DSP) bereitstellen. Diese Tools und das gut dokumentierte Software-Framework ermöglichen es Ihnen, Ihre IoT-Anwendung innerhalb weniger Minuten zum Laufen zu bringen.
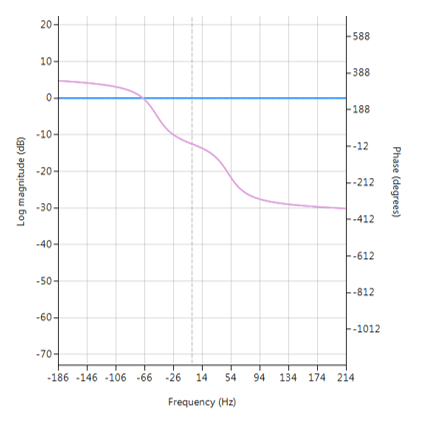
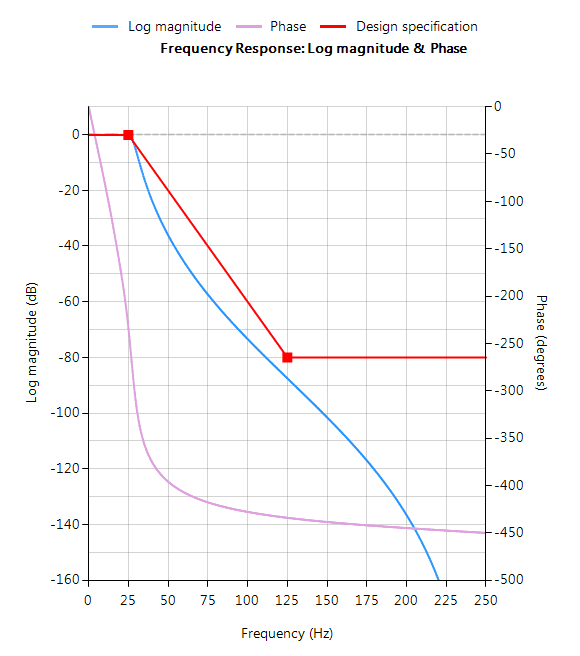
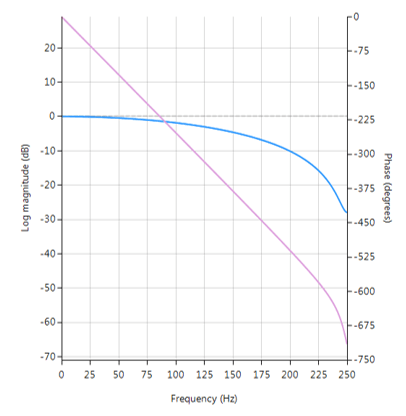
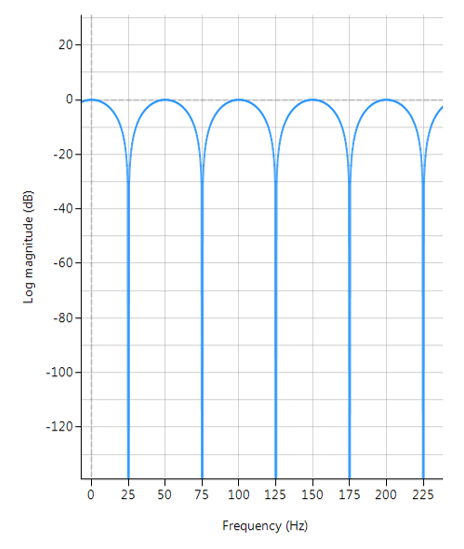 Frequenzgang eines typischen FIR-Kammfilters (Auslöschung ungerader Harmonischer):
Frequenzgang eines typischen FIR-Kammfilters (Auslöschung ungerader Harmonischer):