From lithography machines to medical instruments, real-world edge systems demand deterministic behaviour, reliable sensor interpretation, and carefully engineered algorithms that go far beyond simply training an AI model.
Artificial Intelligence or AI has been glorified as the future of automation, often portrayed as the ultimate solution for efficiency, decision-making, and innovation across industries. It is marketed as a transformative technology for everything from healthcare and finance to autonomous systems and industrial processes.
In practice, this narrative does not reflect present reality, as AI in its current form remains too limited to be relied upon for mission-critical applications that require deterministic behaviour, such as those stipulated by ISO/IEC standards. Although AI performs impressively in controlled settings, it often struggles when exposed to the complexity, variability and unpredictability of real-world environments — particularly when those conditions fall outside the assumptions used to train the model.
This degradation in performance occurs because AI lacks common sense reasoning and struggles with real-world subtlety, i.e. it does not understand the real world in the same way that humans do. Trained largely on synthetic or otherwise limited datasets, it has no intrinsic grasp of the physical or situational subtleties present in operational environments. When real-world conditions differ from those seen during training, AI systems often misinterpret context, leading to unreliable or misleading outcomes — an unacceptable limitation for any mission-critical application.
What is a mission-critical application?
An application is classed as mission-critical when results must be delivered predictably, repeatably and within guaranteed timing constraints defined by system and stakeholder requirements. In many operational environments, unreliable or delayed behaviour can lead directly to financial loss, disrupted processes or regulatory non-compliance. In embedded edge systems (e.g. semiconductor lithography machines, factory automation, medical instruments and logistics automation), algorithms interact directly with physical processes under strict constraints such as bounded latency, limited computational resources, low power consumption and long-term reliability, while often needing to comply with IEC/ISO standards.
At the heart of these systems are physical measurements, i.e. sensors that produce signals that reflect real-world processes, but are often corrupted by noise, interference and environmental disturbances. This broader challenge is increasingly discussed under the banner of Physical AI — intelligent systems that perceive, reason and act within the physical world through sensors, signals and real-time control. Achieving this in practice requires the integration of deterministic digital signal processing (DSP) algorithms, machine learning (ML) and embedded systems design, forming the basis of Real-Time Edge Intelligence (RTEI).
Intelligent machines existed long before AI
The idea of embedding intelligence into machines predates modern AI by decades. Early automation systems implemented rules‑based behaviour using mechanical logic and later electromechanical control systems. However, with the development of electronics, these concepts evolved into embedded systems built on PLCs, microcontrollers (MCUs) and later digital signal processors (DSPs), allowing complex signal analysis and control algorithms to be implemented in software while maintaining robust deterministic behaviour.
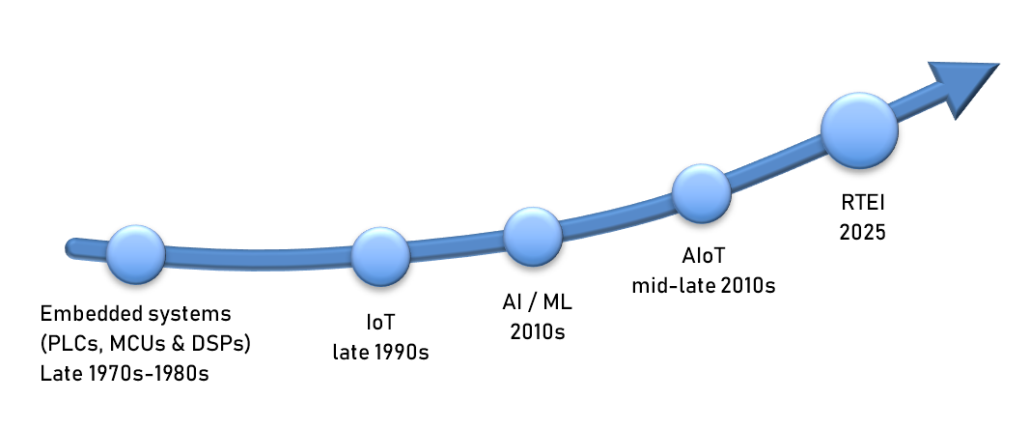
Figure 1: Evolution of intelligent systems. From embedded systems to connected IoT platforms and modern edge devices combining DSP and ML techniques.
The rise of IoT
As sensing technologies became cheaper and connectivity expanded, embedded devices increasingly became networked, leading to the Internet of Things (IoT). In many architectures, devices primarily act as data forwarders, streaming sensor measurements to cloud infrastructure where ML models perform analysis.
While this approach enables powerful functionality, it also introduces limitations such as network latency, bandwidth consumption and dependence on continuous connectivity. For many real‑world systems, intelligence must therefore move closer to the data source.
The challenge of real‑world sensor data
Real-world sensor data are rarely clean, as the signals are affected by measurement noise, powerline interference and environmental disturbances. As such, extracting meaningful information from these measurements has traditionally relied on signal processing techniques, implemented either using analog electronics or digitally using a DSP or microcontroller. These techniques perform tasks such as filtering, spectral analysis and feature extraction. Filtering removes noise, spectral analysis reveals hidden patterns and feature extraction transforms raw measurements into structured information describing the underlying system behaviour. These deterministic methods make signal interpretation predictable and verifiable.
The Evolution from Edge AI to RTEI
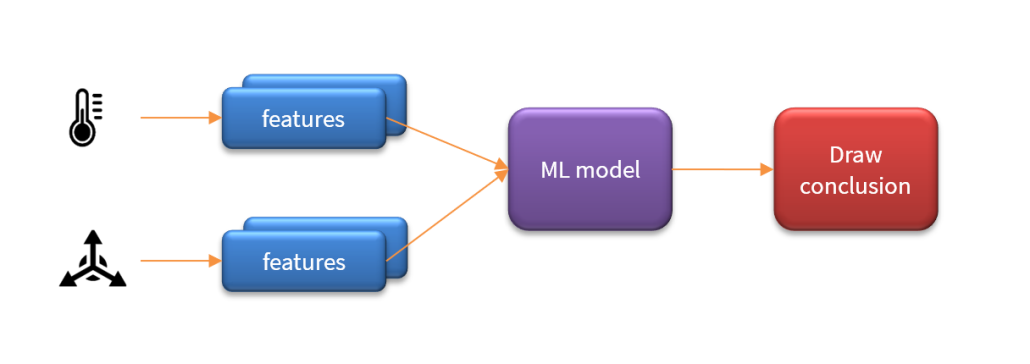
ML models operate most effectively on a few well‑designed features based on the physics of the sensor data. In order to facilitate this, DSP algorithms (designed using human intelligence) are a fundamental pre-step for signal enhancement and feature extraction, such that the ML model can perform its classification task based on high-quality feature data. It is this combination that can provide high classification accuracy, even when conditions slightly deviate from the original training datasets.
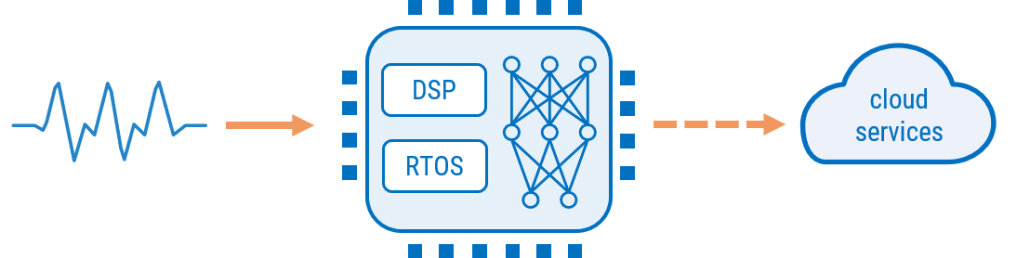
Figure 2: RTEI architecture. Sensor measurements are processed through deterministic DSP algorithms to extract meaningful features for ML inference on the edge device. An optional cloud connection provides secondary services such as access to a data lake and device management.
As such, engineers are increasingly adopting architectures in which DSP, ML and the embedded computing platform (e.g., Arm Cortex processors with hardware support for DSP and ML workloads) are developed together, while remaining aligned with stakeholder requirements and relevant IEC/ISO compliance standards. This augmented approach improves reliability while ensuring long-term robustness across a wide range of edge applications.
RTEI Solutions Handbook
The architectural principles behind Real-Time Edge Intelligence (RTEI), including practical DSP techniques, embedded implementation strategies and real-world case studies, are explored in detail in RTEI solutions handbook, which may be purchased directly from ASN.
Sanjeev is a RTEI (Real-Time Edge Intelligence) visionary and expert in signals and systems with a track record of successfully developing over 26 commercial products. He is a Distinguished Arm Ambassador and advises top international blue chip companies on their AIoT/RTEI solutions and strategies for I5.0, telemedicine, smart healthcare, smart grids and smart buildings.
https://www.advsolned.com/wp-content/uploads/2026/03/Sanjeev_rteibook-e1773052346437.png6081081Dr. Sanjeev Sarpalhttps://www.advsolned.com/wp-content/uploads/2021/07/asn_logo_red_met_tekst_helder-e1755353934770.pngDr. Sanjeev Sarpal2026-03-09 11:25:592026-06-22 13:17:03Why Intelligent Edge Systems Need More Than Just AI
Over the past 40 years, I’ve worked with a wide range of microcontrollers and DSPs across industries—from biomedical systems and industrial control to radar and audio processing. What follows is not theory—it’s a reflection based on firsthand experience with many of the chips and platforms that have shaped the embedded world as we know it.
Before the Age of General-Purpose DSPs
In the early 1980s, Digital Signal Processing (DSP) was often too demanding for microprocessors, which lacked the speed and specialised instruction sets. To address this, manufacturers developed dedicated hardware accelerators—custom ICs built to perform tasks such as Fast Fourier Transforms (FFT), digital filtering, and modulation. Companies such as TRW LSI Products, Harris Semiconductor and even Intel offered function-specific chips that could be dropped into hardware designs to offload processing from the main CPU. These chips laid the groundwork for programmable DSPs, which would later unify these capabilities into a single, software-controlled processor—offering far greater flexibility and reusability.
The Three Titans of Classic DSP: TI, Analog Devices and Motorola
Back in the golden age of classic DSPs, three companies stood out: Texas Instruments, Analog Devices, and Motorola. Each brought its own innovations, architectures, and ecosystems that defined digital signal processing for decades.
Texas Instruments (TI) took the lead with its TMS320 family. Initially introduced in 1983, the fixed-point TMS32010 was one of the first general-purpose DSPs on the market. TI’s later C2000 series brought DSP-like performance to microcontrollers—making it a popular choice for motor control and industrial automation. But it was the TMS320C6000 series, launched in the late 1990s, that truly set a new benchmark. These VLIW (Very Long Instruction Word) DSPs—such as the C62x (fixed-point) and C67x (floating-point)—enabled complex signal analysis, control, and real-time processing with high instruction throughput.Later multicore versions like the C6474 scaled this up with three high-performance DSP cores on a single chip. Some designs even scaled to six cores in custom implementations. These chips made it possible to perform real-time control, sensor fusion, and high-throughput signal analysis in a way that felt almost futuristic —achieving over 28,000 MIPS!
TI also addressed ultra-low-power use cases with the C55x series—a fixed-point DSP line optimised for battery-powered audio and telecommunication applications. Whether for performance or power efficiency, TI had an answer across the spectrum.
Analog Devices (ADI) also played a central role in shaping DSP. Their SHARC and TigerSHARC families offered high-performance floating-point computation, making them a favourite in professional audio, instrumentation, and aerospace applications. Equally important was the Blackfin family—a fixed-point, 16/32-bit hybrid architecture introduced in the early 2000s. Blackfin was optimised for embedded multimedia and signal processing tasks, combining DSP capability with control-oriented features like MMUs, timers, and flexible I/O. ADI offered excellent tools, tight integration with analog components, and very strong real-time performance for demanding applications.
Motorola, meanwhile, contributed both microcontroller and DSP innovations. The legendary 68000, launched in 1979, wasn’t strictly a DSP, but it offered 32-bit general-purpose performance that was far ahead of its time. It was widely adopted in embedded control systems and even some signal processing applications—powering everything from defence platforms to the Commodore Amiga. Motorola also developed a dedicated line of DSPs in the 56000 family, which gained a following in telecommunications and audio. Eventually, Motorola spun off its semiconductor business as Freescale, and later moved to PowerPC architectures. Still, its legacy in early DSP computing remains significant.
Collectively, these three vendors established the blueprint for programmable signal processing—offering both fixed-point and floating-point variants, with increasing performance, integration, and software support over time. Their contributions laid the groundwork for today’s hybrid processors, SoCs, and enhanced microcontrollers.
Enter Microchip’s dsPIC: A Different Kind of DSP
When Microchip launched the dsPIC series in 2001, it was a radical departure from the classic DSP playbook. Instead of focusing on high-performance signal processing, Microchip blended DSP-like instructions into a 16-bit microcontroller core—creating a hybrid that prioritised real-time control, affordability, and embedded peripherals all-in-one. This unorthodox approach defied convention, yet proved surprisingly effective in areas such as motor control and power electronics.
In 2007, Microchip introduced the PIC32, a 32-bit fixed-point MIPS architecture intended to compete with Arm-based microcontrollers. Floating-point support only arrived in PIC32MZ devices in 2013, which still retained the MIPS lineage. By then, the industry had largely moved on. After acquiring Atmel in 2016, Microchip began transitioning toward Arm-based designs—but found themselves playing catch-up. STMicroelectronics, NXP, and others had already embraced Arm more than a decade earlier.
Hitachi and the SH Architecture
Another important player in the 1990s was Hitachi, whose SuperH (SH) family of microcontrollers gained traction in both consumer electronics and automotive systems. The SH architecture offered a compact 32-bit RISC instruction set and DSP-like instructions, making it well-suited for signal processing tasks without the complexity of a full DSP.
The SH-2, in particular, was developed for motor control and stood out for its high performance and nicely designed 32-bit architecture. It was backed by a professional-grade toolchain—more expensive than Microchip’s offerings, and far more capable. While Microchip’s later dsPIC family also targeted fixed-point DSP applications, it was positioned more toward the hobbyist and cost-sensitive market. In contrast, the SH-2 catered to industrial and automotive use cases that demanded greater precision, performance, and software maturity.
The SH line powered everything from set-top boxes and printers to game consoles, with the SH-2 used in the Sega Saturn and the more powerful SH-4 driving the Sega Dreamcast. After merging with Mitsubishi’s semiconductor division to form Renesas in 2003, the SH series continued for a while but was gradually replaced by newer architectures such as RX and eventually Arm-based cores. Nonetheless, the SH family remains a fascinating example of early DSP-capable microcontrollers.
How Arm Processors Changed the Game
The real turning point for Arm came in 1995, when they secured a major contract with Nokia. At the time, Nokia was searching for a low-power processor for its mobile phones—something that could offer signal processing without the power drain of conventional DSPs.
Arm responded with the Thumb instruction set—a compact 16-bit format that dramatically reduced code size while preserving much of the performance of 32-bit Arm instructions. Later, Thumb-2 extended this approach with mixed 16/32-bit support, enabling DSP-like functionality within a power-efficient and compact silicon footprint. It was a game-changer.
However, what truly propelled Arm forward was its strategy and licensing model. Rather than manufacturing chips themselves, Arm licensed its processor IP to silicon vendors—forming deep partnerships with companies such as STMicroelectronics, NXP, Texas Instruments, and Analog Devices. These vendors integrated Arm cores into their own SoCs, often alongside analog front ends, accelerators, or even DSP blocks. The result was a wave of highly optimised, application-specific devices built atop a shared architecture.
A key milestone came with Broadcom’s adoption of the Cortex-A family, which powered the first Raspberry Pi. The Pi’s success brought Arm processors into education, prototyping, and hobbyist markets—seeding a new generation of developers trained on Arm platforms.
Combined with a robust ecosystem of compilers, development tools, and middleware, Arm’s architectural dominance spread rapidly across consumer, industrial, and IoT domains.
The Emergence of the Enhanced Microcontroller
Today’s microcontrollers are far more than just control engines. Many now include SIMD instructions, DSP acceleration, advanced timers, cryptographic modules, and hardware-based security. This gives rise to what might be called the enhanced microcontroller—a class of devices that blur the line between DSPs and MCUs.
Today’s microcontrollers are no longer just simple control devices. Many now include SIMD instructions, DSP acceleration, and hardware-based security. This gives rise to what we can call the enhanced microcontroller—a hybrid class that combines:
General-purpose control and peripheral integration
DSP capabilities for signal conditioning and real-time analysis
Hardware security features such as TrustZone
Low power consumption for battery-powered and IoT systems
Affordable pricing for mass deployment
STMicroelectronics’ STM32 family—based on Cortex-M4 and M7 cores—is a textbook example. These microcontrollers can handle filtering, FFTs, and real-time signal analysis with ease, all while supporting familiar C-based toolchains and low-power sleep modes. They may not match a high-end floating-point DSP in every respect, but they strike an ideal balance for most embedded applications.
Arm Helium: Specialised Edge Hardware Acceleration
Arm Helium—also known as the Armv8.1-M Scalable Vector Extension (MVE)—takes this trend a step further. Designed for edge AI, Helium allows microcontrollers to perform complex filtering, sensor fusion, and even neural inference tasks with impressive efficiency.
The Cortex-M52 captures the essence of this shift—bringing DSP, general-purpose control, security, and low-power performance together into a single core. It introduces Arm TrustZone for embedded security, supports Helium acceleration, and enables localised processing of tasks that once required external compute or specialised DSPs.
Many new Helium-based MCUs also leverage TSMC’s 22nm ultra-low-power process, delivering up to 50% power savings over 40nm chips. This makes edge intelligence viable even in battery- or solar-powered deployments, with no compromise on performance.
It’s Not Just the Hardware—It’s the Ecosystem
Arm’s success is also rooted in the richness of its ecosystem. Developers benefit from mature toolchains, CMSIS-DSP libraries, trusted third-party support, and a wide community of contributors.
This infrastructure allows engineers to focus on solving domain-specific problems rather than wrestling with the underlying hardware. Thanks to tools from ASN, Qeexo, Mathworks and Edge Impulse even sophisticated algorithms—such as biomedical filters, IoT sensor cleaning filters, and predictive maintenance monitors—can now be designed, validated, and deployed as efficient C code within minutes, without requiring deep DSP expertise.
Arm’s ecosystem lowers the entry barrier while raising the ceiling, enabling individual developers and small teams to compete with traditional DSP engineering departments. It’s this accessibility and scalability that makes the platform so compelling for modern embedded development.
Enter the Market Disruptor: Espressif Semiconductor
While much of the evolution in embedded DSP has been driven by microcontrollers based on Arm-Cortex cores from vendors such as STMicroelectronics, Texas Instruments, Analog Devices and NXP, a disruptive force entered the scene in 2016 with the launch of Espressif Semiconductor’s ESP32-WROOM-32.
Based on dual-core Xtensa® 32-bit LX6 processors, the original ESP32 combines integrated Wi-Fi and Bluetooth with a hardware single-precision floating-point unit (FPU) and DSP-style instructions such as multiply-accumulate and saturation arithmetic. Despite lacking hardware support for division and square root, its real-world floating-point performance is often comparable to an Arm Cortex-M4F, thanks to its 240 MHz clock and efficient memory architecture.
Originally aimed at wireless control applications, the ESP32 quickly gained traction for low-cost edge processing tasks—including audio filtering, FFT analysis, and real-time control. Espressif’s open SDK and active global community positioned it as the go-to resource for hobbyists, start-ups, and even commercial IoT products.
While it lacks the advanced DSP acceleration of Arm Helium or the precision of high-end floating-point DSPs, the ESP32’s exceptional cost-to-performance ratio has democratised edge intelligence. It has showed the world that embedded DSP doesn’t have to be expensive or exclusive.
Where Do We Stand Now?
DSP has not disappeared—it has evolved. What was once the domain of dedicated chips has become a fundamental capability, embedded across a wide range of computing platforms. From soft DSP cores in FPGAs to integrated signal processing units in SoCs, and now to scalable vector extensions within microcontrollers, the function of DSP is alive and well—although the form has changed.
Specialist chips, such as those from Texas Instruments or Analog Devices, have not vanished. Many are now integrated into SoCs—handling radar, video, and high-performance industrial tasks in highly integrated systems. The IWR6834 mmwave radar SoC from TI is a perfect example of this convergence: a C674x floating point DSP, two Arm Cortex-R4 processors, communication channels, memory, RF frontend, and antennas all in one compact, high-performance chip. Newer flavours of the SoC, include an AI engine for micro-doppler pattern classification. All of which can be inferenced at the edge in real-time!
However, for most embedded applications, enhanced microcontrollers based on Arm processors now deliver the best balance of performance, power, and price. With integrated support for signal processing, connectivity, security, and energy efficiency—all within a mature ecosystem—they have become the logical choice for the next generation of intelligent edge devices.
Across the Cortex-M family, options like the M4 and M7 provide a strong foundation for signal processing in real-time control applications. The Helium-enabled M55, M85, and most recently the M52, take this further—offering vectorised DSP acceleration, better energy efficiency, and increasingly robust security features.
The Cortex-M52 in particular captures the essence of this evolution. It unifies three essential capabilities for Edge AI into one compact, low-power device:
DSP/AI functionality for signal processing algorithms, such as filtering and feature extraction, and running ML models
Low power consumption to enable battery or energy-harvesting applications
Hardware-based security, including Arm TrustZone, to safeguard code and data
This convergence enables true Real-Time Edge Intelligence (RTEI)—where signals are captured, interpreted, and acted upon locally, without relying on cloud infrastructure or external accelerators. Tasks such as biomedical filtering, sensor fusion, anomaly detection, and embedded inference can now be performed directly at the edge, at a fraction of the power and cost of what was previous required.
And with newer devices manufactured on advanced low-power nodes—such as TSMC’s 22nm process—power consumption is reduced by up to 50% compared to older 40nm designs. This makes the deployment of smart, responsive, and secure edge systems more sustainable and scalable than ever before.
And today, over 90% of all microcontrollers use an Arm core, which is a testament to Arm’s rich ecosystem and proven technologies.
This is not just a shift in hardware—it’s a redefinition of where and how computing happens in the embedded world of 2025 and beyond. It happens in real time, at the edge.
The RTEI solutions handbook covers this exciting technological journey in more detail and is available directly from ASN.
Sanjeev is a RTEI (Real-Time Edge Intelligence) visionary and expert in signals and systems with a track record of successfully developing over 26 commercial products. He is a Distinguished Arm Ambassador and advises top international blue chip companies on their AIoT/RTEI solutions and strategies for I5.0, telemedicine, smart healthcare, smart grids and smart buildings.
https://www.advsolned.com/wp-content/uploads/2025/07/superhuman.png10241024Dr. Sanjeev Sarpalhttps://www.advsolned.com/wp-content/uploads/2021/07/asn_logo_red_met_tekst_helder-e1755353934770.pngDr. Sanjeev Sarpal2025-07-07 15:48:472026-04-06 12:35:09The Birth of Real-Time Edge Intelligence: When DSP and AI Met the Arm Processor
AI has been glorified as the future of automation, often portrayed as the ultimate solution for efficiency, decision-making, and innovation across industries. It has been marketed as an all-encompassing technology capable of transforming everything from healthcare and finance to autonomous systems and industrial processes.
In practice, this narrative does not match reality, as AI in its current form is too limited to be relied upon for mission-critical applications. While it has demonstrated some success in controlled settings, it struggles to adapt to real-world complexities and unpredictability. While tech giants celebrate cloud-trained AI models, these solutions typically fail spectacularly when deployed in dynamic, unpredictable environments. This is because AI lacks commonsense reasoning and struggles with real-world subtlety, i.e. it doesn’t understand the real world in the same way that humans do. It is typically trained on synthetic or limited datasets, which fail to fully capture the diverse and complex scenarios it is expected to handle. As a result, AI systems often misinterpret context, leading to unreliable or misleading outcomes in unpredictable operating environments.
The Consequences of AI’s Limitations
The lack of common sense of how the physical world works and limited training data is a fundamental limitation of AI systems. This can lead to costly failures, false predictions, and in worst cases, complete system breakdowns—making them unsuitable for environments where precision and reliability are paramount.
Another significant limitation, particularly for large-scale models like LLMs, is that AI models require powerful computing resources, making them inefficient for real-time, low-power edge applications. That being said, advancements in Nvidia’s latest chipsets, such as the Jetson Orin series are certainly helping bridge this gap by providing high-performance, power-efficient AI processing directly on edge devices.
While these new chipsets allow AI models to run locally and reduce reliance on cloud computing, AI in general still faces challenges such as excessive power consumption compared to deterministic DSP algorithm-based solutions, reliance on limited datasets, and a lack of explainability. These factors make AI unsuitable for industries requiring strict regulatory compliance and safety. While some smaller AI models can be optimised for edge deployment, many modern AI architectures remain computationally expensive and impractical for real-time, low-power edge applications.
Furthermore, most ML models rely on generalised feature extraction algorithms (mean, standard deviation, kurtosis, correlation etc) and are trained on limited, often unrealistic datasets. AI’s reasoning is entirely data-driven, meaning that we still don’t fully understand how the models work, making them very different from traditional DSP algorithms that use a mathematical recipe or a set of predefined rules. When faced with new, unseen conditions, AI often produces inaccurate or misleading results. In contrast, RTEI (Real-time Edge Intelligence) leverages DSP algorithms that are based on science, making them scientifically accurate and reliable in complex, real-world applications.
The AI Illusion: Why Traditional AI Fails at the Edge
Cloud-based AI solutions dominate today’s landscape because they require vast computational resources to function effectively. However, when deployed on edge devices with limited power and processing capacity, AI’s inefficiencies become apparent.
Predictive maintenance in industrial environments serves as a pertinent example. AI-based solutions are often promoted as game-changers, yet they struggle with a fundamental issue: the lack of real-world failure data. Most foremen and factory managers will not allow researchers to deliberately break machines for data collection, leading to AI models trained on synthetic or limited failure cases. As a consequence, this creates significant gaps in understanding of the normal and abnormal behaviour of the machine or process, leading to potential misdiagnoses and operational inefficiencies.
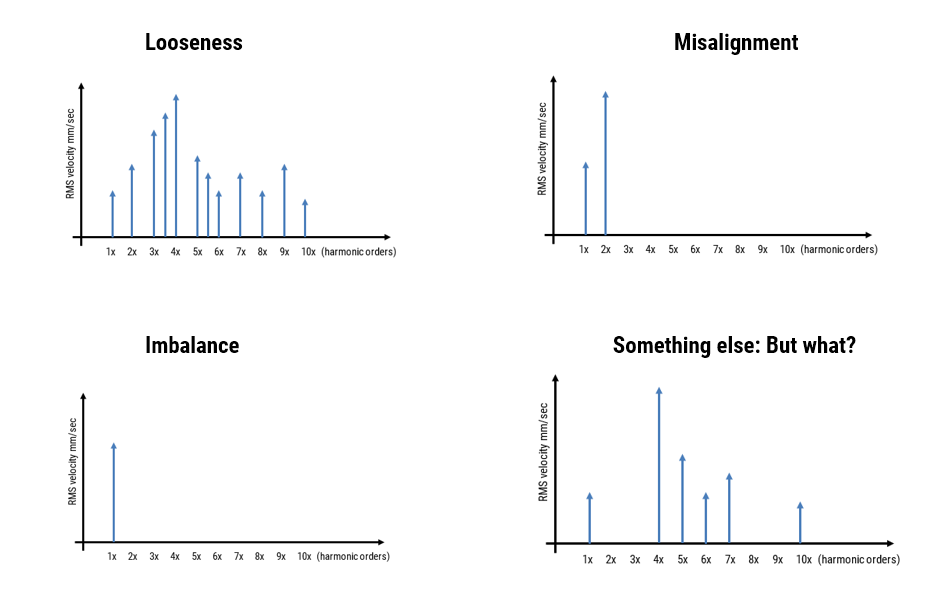
A more effective approach—Real-Time Edge Intelligence (RTEI)—combines DSP algorithms for feature extraction with ML models for classification. For example, in vibration analysis, DSP-based techniques can be used to generate harmonic fingerprints of velocity and displacement (feature extraction), which can be used to detect anomalies before they lead to system failure. These fingerprints or features are then fed into ML models for fault classification. This hybrid approach ensures accuracy and robustness, as DSP algorithms rely on physics and engineering principles (e.g. Fourier analysis, Kalman filtering) rather than data-driven learning.
RTEI: The Future of Edge Intelligence
RTEI (Real-time Edge Intelligence) represents a fundamental shift in AI for edge computing. By integrating real-time DSP algorithms with ML models, RTEI enhances accuracy, reliability, and computational efficiency. Unlike traditional AI, which operates on probabilistic reasoning, RTEI leverages fundamental scientific principles, making it more predictable and suited for mission-critical applications like autonomous vehicles, industrial automation, and medical diagnostics, where any misjudgements could have catastrophic consequences.
For Edge IoT to reach its true potential, intelligence must be embedded directly into devices. We are already seeing promising advancements—industrial-grade vibration analysis systems using real-time DSP algorithms to detect early signs of mechanical failure, and aircraft autopilot systems that rely on deterministic control algorithms rather than AI, ensuring mission-critical reliability in aviation, and self-driving cars that utilize LiDAR, cameras and other sensors to navigate autonomously without solely depending on AI-based decision-making. These systems prioritise reliability through scientifically proven methods rather than speculative, data-driven predictions.
As AI’s reasoning is fundamentally different to that of traditional DSP algorithms, a key point to realise here is that unlike DSP algorithms based on predefined rules and mathematical concepts (i.e. designed with human intelligence), how the AI reaches its result remains an enigma, and is the primary reason why they shouldn’t be allowed to operate without any scrutiny on critical processes.
RTEI enhances the overall solution by adapting its feature extraction algorithms to real-world variations, ensuring consistently high-quality data for AI classification. For example, when measuring analog sensor data using an ADC, temperature variations in the instrumentation electronics would cause the sampling rate to slightly vary. This variation would lead to a mismatch between the ideal model and real-world signal tendered to the classifier. As such, a conventional AI model would struggle, as these variations were probably not taken into account during the model’s training phase.
This is where DSP algorithms, such as a method that analyses timestamps or a Kalman filter can shine, as sampling rate variation can be taken into account in the estimation model. As such the DSP estimation algorithm can estimate the signal’s sampling rate in real-time and use this estimate to perform other operations required for the feature extraction operation. This ensures that only high-quality features are provided to the classifier in varying temperature environments—a very realistic scenario! Finally, it should be noted that this approach has the added advantage of requiring less ML training data, which expedites development and lowers project costs.
The Role of Arm Processors in RTEI
A major driving force behind this revolution is the Arm-based processor ecosystem. Unlike traditional cloud-based AI solutions, Arm Cortex processors (including the newer Arm Helium processors) provide a power-efficient way to run edge-optimized AI models in real-time. These processors are already at the core of smart sensors, embedded systems, and industrial automation, ensuring that AI-powered IoT devices can process and react instantly to changes in their environments.
Lockstep Processor Technology for Mission-Critical Systems
A fundamental aspect of mission-critical systems is Lockstep processor technology, which ensures redundancy and fault tolerance in real-time applications. Processors such as the Arm Cortex-R4 and Cortex-R5 are designed with lockstep functionality, where two identical processors run the same instructions simultaneously and compare results.
Lockstep technology is particularly useful for detecting hardware faults, which can arise from environmental influences, component ageing and external interference. For example, bit flips in memory can occur due to electromagnetic interference (EMI) from industrial machinery or power supply fluctuations, corrupting data memory and leading to algorithmic errors.
A key concept for dual-processor Lockstep processing is that it detects discrepancies but does not determine which processor is correct. Since both processors execute the same software, software bugs will appear identically on both, making lockstep ineffective for detecting programming errors. For true fault tolerance and error correction, a Triple Modular Redundancy (TMR) approach is often used, where three processors execute the same software, and a majority vote determines the correct outcome either per cycle or function.
ASIL Compliance and Automotive Safety
Lockstep technology is essential for Automotive Safety Integrity Level (ASIL) compliance, ensuring that automotive safety systems can detect and handle processor faults. For example, in an adaptive cruise control system, if a processor mismatch occurs, the system disengages cruise control rather than making an unsafe decision. This prioritisation of passenger safety over continuous operation is crucial for mission-critical applications.
For systems requiring the highest levels of reliability—such as flight control systems or nuclear power plants—TMR is employed to prevent a single fault from compromising the entire system.
Neoverse: High-Performance Edge Computing
Arm’s Neoverse architecture is a high-performance processor family designed for data centres, edge computing, and cloud infrastructure. Unlike Cortex processors, which are commonly used in mobile and embedded applications, Neoverse is optimized for scalability, power efficiency, and AI acceleration, making it well-suited for high-performance edge computing and is an interesting alternative to Nvidia’s Jetson Orin GPU series.
With advancements in Arm Cortex (especially Helium) and Neoverse architectures, developers can now deploy real-time AI workloads directly on edge devices, eliminating cloud dependencies. This means better security, reduced costs, and instant decision-making, all of which are essential for next-generation IoT applications.
Key takeway:The Evolution from AI to RTEI
Rather than dismissing AI’s role in edge applications, RTEI represents the next evolutionary step—one that acknowledges AI’s limitations and enhances its capabilities through deterministic DSP algorithms. Traditional AI struggles to generalize beyond pre-trained scenarios, lacks commonsense reasoning, and remains a black box in decision-making. These weaknesses make it ill-suited for dynamic, real-world applications.
The time has come to move beyond the assumption that cloud-trained AI can work everywhere. Instead, RTEI offers a hybrid intelligence system—combining the strengths of AI and DSP for real-time, reliable, and efficient edge intelligence.
By embedding intelligence directly into edge devices using Arm processors, lockstep technology, and deterministic DSP algorithms, we can build smarter, safer and more adaptable systems.
Sanjeev is a RTEI (Real-Time Edge Intelligence) visionary and expert in signals and systems with a track record of successfully developing over 26 commercial products. He is a Distinguished Arm Ambassador and advises top international blue chip companies on their AIoT/RTEI solutions and strategies for I5.0, telemedicine, smart healthcare, smart grids and smart buildings.
https://www.advsolned.com/wp-content/uploads/2024/10/robot_reading-scaled-e1729851827745.jpg7201080Dr. Sanjeev Sarpalhttps://www.advsolned.com/wp-content/uploads/2021/07/asn_logo_red_met_tekst_helder-e1755353934770.pngDr. Sanjeev Sarpal2025-01-31 15:05:132025-02-03 09:20:07Rethinking AI: Why Edge Intelligence must go beyond traditional ML
Generative AI (software capable of producing new content such as text, images, music or animations) has captured the public’s imagination. Many websites offer tools for creating playful visuals or novelty outputs with just a few clicks, but these entertainment-focused applications often fail to address the pressing, real-world demands of modern businesses.
While such generative technologies excel at creativity and rapidly prototyping ideas, Real-Time Edge Intelligence (RTEI) is positioned to have a far greater impact where it counts most, i.e. mission-critical operations. By processing data at the Edge and providing immediate insights, RTEI directly tackles key needs in manufacturing, healthcare, automotive, logistics, and other fields—scenarios in which split-second decisions and reliability are paramount.
Immediate Decision-Making
While generative AI excels at creative tasks, such as producing articles or amusing content—its outputs typically aren’t time-sensitive in physical environments, i.e. they’re not real-time. RTEI, on the other hand, processes real-time sensor data (e.g. temperature, CO2 levels, vibration etc) at the Edge in order to take split-second actions. Typical applications include: worker safety systems, autonomous vehicles and factory robotics. This local intelligence can literally save lives and prevent costly downtime for factory owners.
Operational ROI and Efficiency
Generative AI’s large DNN models are computationally intensive, demanding powerful GPU cloud infrastructure which is power intensive and extremely expensive. Due to the present energy crisis currently gripping the Western world, cutting costs is paramount.
Edge-based intelligence runs on significantly lower-cost hardware (such as Arm Helium microcontrollers), often with lower bandwidth needs and reduced energy consumption, making them more suitable for cost-critical factory automation. Real-time data analysis at the edge can uncover anomalies in machinery before they lead to breakdowns or defects. This proactive approach significantly reduces downtime and waste—outcomes with immediate, tangible returns on investment (ROI).
Industry 5.0 Alignment
Industry 5.0 highlights collaboration between humans and machines, with an emphasis on personalization and sustainability. RTEI facilitates swift, localized decisions that keep production lines adaptive, safe, and responsive to human input—enabling a true fusion of human creativity and machine efficiency.
Workers can use Augmented Reality (AR) glasses or even other wearable devices to receive real-time insights on equipment performance or process instructions. By leveraging local analytics, these tools remain functional and effective mediums in areas with poor cloud connectivity—a massive advantage in busy factories or at remote sites with poor Wi-Fi coverage.
Arm Helium: specialised Edge hardware accelerators
Emerging technologies like Arm Helium – also known as the Armv8.1-M Scalable Vector Extension (MVE) enable complex filtering, sensor-fusion, and inference tasks to be performed at the microcontroller level. This hardware acceleration makes edge-based AI solutions far more powerful than before, paving the way for advanced local inference and localised signal processing for sensor data.
The new M52 core is particularly interesting as it adds Arm’s TrustZone security paradigm to the mix. This innovation allows a single low-power edge device to handle intensive AI tasks (e.g., computer vision), perform DSP operations for filtering IoT sensor data, and provide robust hardware security—all in one solution!
Many of the latest Helium-based microcontrollers also leverage TSMC’s 22nm ultra-low-power semiconductor technology, delivering up to a 50% reduction in power consumption compared to the older 40nm process. As a result, RTEI can now be deployed in battery- or solar-powered devices, extending sustainability and reach without sacrificing performance.
Key takeaways
Generative AI will remain a formidable tool for creativity, rapid prototyping, and entertainment oriented applications. However, its reliance on large-scale cloud resources and the generally non-urgent nature of its outputs limits its immediate impact on mission-critical operations. Real-Time Edge Intelligence (RTEI) by contrast, offers instantaneous, localised decision-making, fortified data security, and tangible cost savings—precisely the attributes demanded by many business owners.
As we enter a turbulent 2025, where rising inflation and energy costs are daily matters of concern, RTEI’s practical benefits will far outweigh the playful allure of generative AI. The evolution of specialised hardware (exemplified by Arm Helium) further confirms RTEI as the essential technology shaping next generation manufacturing, healthcare, logistics and beyond. In this rapidly changing landscape, RTEI is destined to surpass generative AI in real-world importance, defining the future of industrial and operational intelligence.
Sanjeev is a RTEI (Real-Time Edge Intelligence) visionary and expert in signals and systems with a track record of successfully developing over 26 commercial products. He is a Distinguished Arm Ambassador and advises top international blue chip companies on their AIoT/RTEI solutions and strategies for I5.0, telemedicine, smart healthcare, smart grids and smart buildings.
https://www.advsolned.com/wp-content/uploads/2025/01/Generative_AI-e1737734725973.jpg6671000Dr. Sanjeev Sarpalhttps://www.advsolned.com/wp-content/uploads/2021/07/asn_logo_red_met_tekst_helder-e1755353934770.pngDr. Sanjeev Sarpal2025-01-24 17:01:592025-01-24 18:13:03Beyond the Hype: How Real-Time Edge Intelligence will surpass Generative AI in 2025
In an era dominated by IoT applications, sensors are everywhere—embedded in our homes, vehicles, industries, and even our bodies. They generate an immense amount of data that holds valuable insights waiting to be uncovered. Traditional DSP algorithms like the Fast Fourier Transform (FFT) and Kalman filters have been fundamental in analysing this data, effectively extracting features of interest and filtering out noise. These algorithms excel in tasks such as frequency analysis, state estimation, and noise reduction, providing precise and reliable results.
However, as the complexity and volume of sensor data grow, relying solely on DSP algorithms is no longer sufficient. The patterns and anomalies within large-scale, multidimensional data streams often exceed the capabilities of traditional methods. This is where AI and ML models become indispensable. AI/ML models are adept at handling complex, nonlinear patterns and can make predictions based on learned data. Yet, they lack common sense of the process that they are modelling and are also highly dependent on the quality of the input data.
Combining the strengths of both DSP algorithms and AI/ML models leads to more robust and efficient sensor data processing systems. DSP techniques can preprocess and enhance the data, making it cleaner and more relevant for AI models to analyse. Arm Cortex processors play a pivotal role in this augmentation. Renowned for their efficiency and performance, they are widely used in AIoT (Artificial Intelligence of Things) solutions, enabling the simultaneous execution of DSP algorithms and AI/ML models directly on edge devices. This combination allows for intelligent data processing that is both rapid and power-efficient, meeting the demands of modern technology applications.
The Necessity of DSP Algorithms
DSP algorithms are essential for transforming raw sensor data into meaningful information. Sensors often collect data that is noisy or distorted, making direct interpretation challenging. DSP algorithms tackle these issues by performing noise reduction, signal enhancement, and feature extraction.
For example, the FFT converts time-domain signals into frequency-domain representations, revealing patterns crucial for applications like vibration analysis and audio. Digital filters such as lowpass, bandpass and high-pass eliminate unwanted frequency regions, isolating signals of interest and improving data quality.
Without DSP techniques, valuable insights within sensor data might remain hidden. DSP algorithms lay the groundwork by refining the data, ensuring that both traditional analysis methods and AI/ML models receive high-quality inputs. They provide reliable results based on established mathematical principles and human reasoning, which is essential in critical applications like medical devices, aerospace, and industrial automation where precision and repeatability are paramount.
As such, it’s important to realise that preprocessing of sensor data with DSP algorithms is an essential step, since AI/ML models rely heavily on the quality of input data for accurate predictions.
Moreover, DSP algorithms are efficient and can operate in real-time on devices with limited resources, such as Arm Cortex processors, making them ideal for edge computing where real-time processing is needed.
State-of-the art AIoT microcontrollers
The Arm Cortex-M52, M55 and M85 are targeted for AIoT applications on microcontrollers. These processors use Arm’s powerful Armv8.1-M architecture that implement their M-Profile Vector Extension (MVE) technology (nicknamed Helium) allowing for 128bit vector mathematical operations (such as dot product operations) needed for ML and some DSP algorithms.
However, as only a few IC vendors (Alif, Ambiq, Samsung, Renesas, HiMax, Bestechnic, Qualcomm) have currently released or are planning to release any devices, Helium processors remain a gem for the near distant future.
The Necessity of AI/ML Models
While DSP algorithms are powerful, they are generally designed to address specific problems and may not scale well with the increasing complexity and volume of sensor data. AI/ML models come into play by offering the ability to learn from data, identify complex patterns, and make predictions without explicit programming for each task. They are particularly useful when:
Patterns are too complex for manual feature extraction: In cases like image and speech recognition, where the features of interest are not easily extracted using traditional DSP methods.
Data is high-dimensional or unstructured: AI/ML models can handle large datasets with numerous variables, finding relationships that may not be apparent using scientific reasoning.
Adaptive learning is required: ML models can be improved over time with more training data as it becomes available.
However, it is important to realise that AI/ML models lack common sense and are heavily reliant on the data they are trained on. As such, they may misinterpret or overlook important features if the input data is noisy or lacks proper pre-processing.
Augmenting DSP and AI/ML: a complementary approach
To maximize the benefits of sensor data processing, a hybrid approach that combines DSP algorithms with AI/ML models is often the most effective. Here’s how they complement each other:
Pre-processing with DSP:
Noise Reduction: Digital filters (e.g. lowpass) can be used to clean up the signal before it reaches the ML model.
Feature Extraction: Algorithms like FFT or DWT can extract meaningful features that reduce the dimensionality of the data and highlight important patterns.
AI/ML for Pattern Recognition:
Classification and Regression: ML models can take the features extracted by DSP algorithms and perform tasks like anomaly detection, predictive maintenance, and classification.
Adaptive Learning: ML models can adapt to new data trends over time, improving their accuracy and usefulness.
Feedback Mechanisms:
Model Refinement: The outputs from AI/ML models can inform adjustments in DSP algorithms, creating a feedback loop that enhances overall system performance.
Example Application: Vibration analysis in Industrial equipment
DSP Stage:
FFT Analysis: Converts vibration signals (usually captured from an accelerometer) from the time to frequency domain to identify characteristic frequencies associated with specific mechanical faults.
Feature Extraction: Extracts features like peak frequencies, amplitudes, and harmonics. These amplitude features can be further scaled (using properties of the FFT) to extract velocity or displacement estimates from the original acceleration data.
AI/ML Stage:
Fault Classification: An ML model trained on labelled data predicts the type of fault (e.g., imbalance, misalignment, bearing wear) based on the extracted features.
Predictive Maintenance Scheduling: Regression models estimate the remaining useful life of equipment, allowing for proactive maintenance.
Benefits of augmentation:
Improved Accuracy: Pre-processing with DSP algorithms enhances the quality of data fed into AI/ML models.
Efficiency: Reduces computational load by focusing on relevant features, which is especially important for edge devices with limited resources.
Reliability: Combining deterministic DSP outputs with probabilistic AI/ML predictions leads to more robust systems.
Detecting motor faults via harmonic fingerprint analysis
Key takeaways
The fusion of DSP algorithms and AI/ML models represents a powerful paradigm for sensor data processing in modern technology. DSP algorithms provide the necessary tools for signal enhancement and feature extraction, ensuring that the data is in the best possible form for analysis. Despite lacking any common sense (see here for a previous article), AI/ML models certainly excel at finding complex patterns and making predictions based on the processed data, making them attractive for many modern AIoT applications.
Arm Cortex processors play a pivotal role in this integration, offering the computational capabilities required to run both DSP algorithms and AI/ML models efficiently on the same platform. This synergy enables the development of advanced AIoT solutions that are capable of processing sensor data intelligently at the edge, leading to faster decisions and reduced latency. This is further strengthend with Arm’s TrustZone extension, that provides developers with a hardware data security model, offering a high level of security against hacking, stealing of encryption keys and counterfeiting.
As the volume and complexity of sensor data continue to grow, leveraging the strengths of both DSP and AI/ML will be essential for advancing technology across industries. By adopting a complementary approach and utilising decent computational platforms such as Arm’s Cortex family of processors, we can build more effective, efficient, and intelligent systems that meet the demands of the future.
Sanjeev is a RTEI (Real-Time Edge Intelligence) visionary and expert in signals and systems with a track record of successfully developing over 26 commercial products. He is a Distinguished Arm Ambassador and advises top international blue chip companies on their AIoT/RTEI solutions and strategies for I5.0, telemedicine, smart healthcare, smart grids and smart buildings.
https://www.advsolned.com/wp-content/uploads/2024/11/futuristic_sensors-scaled-e1732806588596.jpg4411029Dr. Sanjeev Sarpalhttps://www.advsolned.com/wp-content/uploads/2021/07/asn_logo_red_met_tekst_helder-e1755353934770.pngDr. Sanjeev Sarpal2024-11-28 16:03:252024-12-02 13:57:40Maximizing IoT sensor performance: Getting the most out of your sensor with DSP and AI
In the rapidly evolving landscape of digital transformation, organizations are increasingly leveraging Real-Time Edge Intelligence (RTEI) solutions to enhance operational efficiency and decision-making capabilities. RTEI refers to the deployment of advanced data processing and analytics at the edge of the network (i.e. closer to where data is generated) rather than relying solely on centralized cloud infrastructure. This approach successfully addresses the challenges posed by traditional data processing methods and offers significant benefits across multiple sectors, particularly when building solutions with Arm processor technology.
Key concepts of Real-Time Edge Intelligence
Improved Response Times: RTEI enables immediate data processing and analysis, resulting in faster decision-making. For industries like healthcare, manufacturing, and transportation, this can mean the difference between success and failure in critical situations. Arm processors allow for high-performance computing in compact form factors, making them ideal for real-time applications.
DSP/ML at the Edge: Arm’s extensive ecosystem of partner solutions and in-built algorithmic accelerator technology makes deploying DSP algorithms and ML models on the edge very easy. This enables RTEI solutions to provide real-time insights and predictions of the process that they’re monitoring, empowering organizations to automate processes and respond dynamically to changing conditions.
Data cleaning and feature extraction: Arm-based devices can clean noisy sensor data and extract features interest at the edge, sending only relevant data to the cloud. This minimizes bandwidth usage and optimizes network performance, ensuring that only critical data is transmitted. Arm’s low-power architecture is ideal for this task, allowing devices to perform complex computations in battery-powered applications.
Cost Efficiency: By reducing the amount of data sent to the cloud, organizations can lower bandwidth costs and cloud storage expenses. The efficient processing capabilities of Arm processors allow for more effective resource use, leading to operational cost savings. Their energy efficiency further contributes to reduced operational costs in large-scale deployments.
Increased Reliability: RTEI solutions can operate independently of cloud connectivity, ensuring that essential mission-critical applications continue to function even during a network outage. The robustness of Arm technology in various environmental conditions enhances system reliability and operational resilience, particularly in remote locations, typically encountered in many IoT applications.
Scalability: Arm-based solutions can be easily scaled to accommodate growing data volumes and an increasing number of connected devices. The modularity of Arm architecture supports the development of a diverse ecosystem of devices, making it easier for organizations to adapt to changing business needs.
Enhanced security and privacy with Arm TrustZone
Security is a critical concern for edge devices, particularly those handling sensitive data. Arm TrustZone (Cortex-M33, Cortex-M52 and Cortex-A) implements a security paradigm that discriminates between the running and access of untrusted applications running in a Rich Execution Environment (REE) and trusted applications (TAs) running in a secure Trusted Execution Environment (TEE). The basic idea behind a TEE is that all TAs and associated data are secure as they are completely isolated from the REE and its applications. As such, this security model provides a high level of security against hacking, stealing of encryption keys, and counterfeiting, and as such provides an elegant way of protecting sensitive client information.
DSP support for Algorithms
DSP is critical for many RTEI applications, including audio and video processing, sensor signal processing and data analysis. Arm’s broad range of processors offer extensive DSP capabilities, allowing for the implementation of complex algorithms in floating-point. The Cortex-M family dominates the low-power micro-controller market as described below, whereas the more powerful Application or Cortex-A processors target mini-computers, such as the Raspberry Pi and smartphones etc. The Cortex-R family targets real-time safety-critical applications, such as automotive and radar.
All three types of processors offer algorithmic support, but the Cortex-M family is particularly interesting, as it adds DSP functionality to low-power microcontroller devices making it highly desirable for the IoT market, as we now discuss in the following section.
Cortex-M processors
Although a few processor technologies exist for microcontrollers (e.g. RISC-V, Xtensa, MIPS), over 90% of the microcontrollers used in the smart product market are powered by so-called Arm Cortex-M processors that offer a combination of high algorithmic performance, low-power and security. The Arm Cortex-M4 is a very popular choice with several silicon vendors (including ST, TI, NXP, ADI, Nordic, Microchip, Renesas), as it offers DSP (digital signal processing) functionality traditionally found in more expensive devices and is low-power.
Acceleration of DSP calculations
The Armv7E-M architecture supports a DSP extension that implements an SIMD (single instruction, multiple data) architecture extension that can significantly improve the performance of an algorithm. The basic idea behind SIMD involves parallel execution of an instruction (e.g. Add, Subtract, Multiply, Divide, Abs etc) on multiple data elements via the use of 64 or 128-bit registers. These DSP extension intrinsics (SIMD optimised instruction) support a variety of data types, such as integers, floating and fixed-point.
The high efficiency of the Arm compiler allows for the automatic dissemination of your C code in order to break it up into SIMD intrinsics, so explicit definition of any DSP extension intrinsics in your code is usually unnecessary. The net result for your application is much faster code, leading to better power consumption and for wearables, better battery life.
What algorithmic operations would use this?
The following examples give an idea of operations that can be significantly speeded up with SIMD intrinsics:
vadd can be used to expedite the calculation of a dataset’s mean. Typical applications include average temperature/humidity readings over a week, or even removing the DC offset from a dataset.
vsub can be used to expedite numerical differentiation in peak finding for a sinewave tracking application.
vabs can be used for expediting the calculation of an envelope of a fullwave rectified signal in EMG biomedical and smartgrid applications.
vmul can be used for windowing a frame of data prior to FFT analysis. This is also useful in audio applications using the overlap-and-add method.
The hardware floating point unit is very good for expediting MAC (multiply and accumulate) operations used in digital filtering, requiring just three cycles to complete. Other DSP operations such as add, subtract, multiply and divide require just one cycle to complete.
Key takeaways
As organizations continue to embrace digital transformation, Real-Time Edge Intelligence (RTEI) solutions, particularly when integrated with Arm processor technology, stand out as key enablers of innovation and efficiency. By harnessing the power of edge computing and the performance advantages of Arm’s Cortex-A and Cortex-M architectures, the security benefits of Arm TrustZone, and the DSP capabilities for advanced algorithms, businesses can achieve rapid decision-making, enhance security, and optimize operational costs. The future of data processing lies at the edge, and those who adopt RTEI solutions powered by Arm technology will be well-positioned to thrive in an increasingly competitive landscape.
Sanjeev is a RTEI (Real-Time Edge Intelligence) visionary and expert in signals and systems with a track record of successfully developing over 26 commercial products. He is a Distinguished Arm Ambassador and advises top international blue chip companies on their AIoT/RTEI solutions and strategies for I5.0, telemedicine, smart healthcare, smart grids and smart buildings.
Unexpected equipment failures can be expensive and potentially catastrophic, resulting in unplanned production downtime, costly replacement of parts and safety and environmental concerns. With many factories and process control plants facing an ever-increasing shortage of experienced personnel, many are now looking for AI based systems to replace the ‘experienced old guy’ who knows everything about the machine and reduce their Total Cost of Ownership (TOC).
The challenge is however, how do you build and train an AI CbM system to replace an expert ?
What is CbM?
As part of the I4.0 revolution, Condition based monitoring (CbM) of machines has received a great amount of attention, as factories look to maximise their production efficiency and reduce their TOC, while at the same time retaining the invaluable skills of experienced foremen and production workers. As such, CbM is a process for monitoring equipment during operation to identify any deterioration, enabling maintenance to be planned and operational costs reduced.
CbM 5G edge computing
Many are factory owners are suspicious of cloud-based enterprise solutions offered by Microsoft, Amazon and Google as data leaves the site and any latency issues could affect production output. Recently 5G edge computing has received much attention, whereby all time-critical operations are undertaken at the edge (i.e. near to the asset in the factory) via smart sensors.
Arm’s rich set of Cortex processors offer a combination of high performance, ML/DSP computation support and low power. This is further strengthened by Arm’s new Helium Cortex-M55 and Cortex-M85 AI based processors that have been specially designed for edge-based AI applications – the latter offers an impressive 3DMIPS/MHz making it a good fit for ML and DSP algorithms. These processors and supporting libraries now allow developers to develop high-performance CbM smart sensors to perform their computationally intensive tasks at the edge and communicate the results via a 5G network to a smartphone or database. This provides higher reliability and scalability than expensive cloud-based solutions reliant on big data.
It would seem that big data has had its day!
Vibration sensor technology
Contactless MEMS (microelectromechanical systems) accelerometers sensors are an excellent alternative to the well-established, but bulky and expensive (25-500+ EUR) Piezo sensors for obtaining vibration information. MEMS sensors are relatively low cost (10-30 EUR) and can offer a response down to DC (zero Hertz), which is useful for the detection of imbalance at very low rotational speeds. MEMS accelerometers also have a self-test feature whereby the sensor can be verified to be 100% functional. They produce acceleration data that can be analysed by various vibration monitoring algorithms.
Spectral vibration monitoring via the FFT (Fast Fourier Transform) is regarded as an industry standard for machine vibration analysis. If a mechanical problem exists, the FFT spectra (multiple spectrums) will provide information to help determine the source and cause of the problem. Coupled with the right AI algorithms, the features from the FFT analysis can be used to identify the root cause of the failure, such as motor imbalance, misalignment, and looseness. These properties and challenges faced by the FFT will be discussed further later on in the article.
There are several steps to follow as guidelines to help achieve a successful vibration monitoring programme. The following is a general list of these steps:
Collect useful information: Look, listen and feel the machinery to check for resonance. Identify what measurements are needed (point and point type). Conduct additional testing if further data are required.
Analyse spectral data: Evaluate the overall values and specific frequencies corresponding to machinery anomalies. Compare overall values in different directions and current measurements with historical data.
Multi-parameter monitoring: Use additional techniques to conclude the fault type. (Analysis tools such as phase measurements, current analysis, acceleration enveloping, oil analysis and thermography can also be used.)
Perform Root Cause Analysis (RCA): In order to identify the real causes of the problem and to prevent it from occurring again.
Reporting and planning actions: Use a Computer Maintenance Management System (CMMS) to rectify the problem and take action to achieve a plan.
As aforementioned, a popular device used to obtain acceleration data is a so-called ‘accelerometer’. These devices are semiconductor-based MEMS (microelectromechanical systems) and provide 3D (i.e. tri-axial) acceleration time domain data to a supporting microcontroller.
Before FFT analysis, the accelerometer data is usually passed through integration signal processing blocks, in order to convert the time domain acceleration data into velocity and displacement data. These blocks are comprised of a highpass filter and cumulative sum (integration). The highpass filter is essential for removing the effects of DC and noise, which would cause an offset in the output (i.e. the result of the integration). Depending on the severity of the noise/DC the output may even saturate, making it unusable for analysis. The design of a suitable highpass filter is an extremely challenging task and is the primary reason why many vibration analysis systems struggle to measure vibrations <10Hz (600 RPM).
Collect useful information
When conducting a vibration program, certain preliminary information is needed in order to conduct an analysis. The identification of components, running speed, operating environment and types of measurements should be determined initially to assess the overall system.
Identify components of the machine that could cause vibration
Before a spectrum can be analysed, the components that cause vibration within the machine must be identified. For example, you should be familiar with these key components:
If the machine is connected to a fan or pump, it is important to know the number of fan blades or impellers.
If bearings are present, know the bearing identification number or its designation.
If the machine contains, or is coupled, to a gearbox, know the number of teeth and shaft speeds.
If the machine is driven with belts, know the belt lengths.
The above information helps assess spectral components and helps identify the vibration source. Determining the running speed is the initial task. There are several methods to help identify this parameter.
Identifying the running speed
Knowing the machine’s running speed is critical when analysing an FFT spectrum. Running speed is related to most components within the machine and therefore, aids in assessing overall machine health. There are several ways to determine running speed:
Read the speed from instrumentation at the machine or from instrumentation in the control room monitoring the machine.
Look for peaks in the spectrum at 1,800 or 3,600 RPM (60Hz countries), 1,500 and 3,000 RPM (50Hz countries) if the machine is an induction electric motor, as electric motors usually run at these speeds. If the machine is variable speed, look for peaks in the spectrum that are close to the running speed of the machine during the time at which the data is captured.
An FFT’s running speed peak is typically the first significant peak in the spectrum when reading the spectrum from left to right. Search for this peak and check for peaks at two times, three times, four times, etc. (at the harmonic frequencies).
Challenges with the FFT algorithm
FFT spectra allow us to analyse vibration amplitudes at various component frequencies on the FFT spectrum. In this way, we can identify and track vibration occurring at specific frequencies. Since we know that particular machinery problems generate vibration at specific frequencies, we can use this information to diagnose the cause of excessive vibration.
Challenges with spectral analysis
The sampling rate of the accelerometer drifts with temperature: This results in a mismatch between the FFT analysis sampling frequency and the real situation. As such, the amplitude and frequency estimates of the vibration will be incorrect.
Frequency resolution: the frequency of the vibration peak may have a fractional value. If the resolution of the Fourier algorithm is not fine enough, it will ‘smear’ the result, resulting in a lower amplitude estimate.
Running speed: this is typically known apriori, but will have a degree of error associated with it and will change with temperature. For example, 3000 rpm ±1% is 50Hz ±0.5Hz at the fundamental running frequency. In order to track higher harmonics (i.e. multiples of the running speed) the FFT must have sufficient frequency resolution to accurately estimate the amplitude at the right frequency.
Traditional FFT based analysis uses a very high number of computational points in order to achieve a 1Hz resolution. Although this is OK, it still does not overcome the fractional frequency components and requires considerable computational effort.
Some designs use a phaselocked loop, that tracks the running frequency and sets the FFT analysis sampling frequency to a multiple (e.g. 20x) of the running speed. Although this is a very good workaround, it requires specialised hardware (such as an expensive ASIC) and is inflexible for changes in running speed.
ML feature extraction, DSP algorithms and models
In order to build an ML (machine learning) model for an AI CbM application, several challenges need to be overcome.
Definition of classes: In order to make a classification, ML classes must be defined. In the simplest sense, this can be Fault or Normal behaviour, but what about other cases?
ML Features: what data features will be used for the ML model? Running speed, harmonics, RMS amplitude? What physical and mathematical principles should I use to build these algorithms?
Obtaining ML training data: How will you obtain suitable datasets for ML training? In many cases this is not easy to obtain, as many foremen will not allow any disruption to their time-critical production lines.
Preparing datasets: After answering the aforementioned questions, the next challenge will be to capture and prepare the datasets for the ML classification. This is traditionally where a good 90% of a data scientist’s time will be spent. Therefore, it is prudent to invest in high fidelity feature extraction edge algorithms in order to expedite this step. This will also have the advantage of increasing the reproducibility and consistency of the results, which is where many AI based systems perform poorly.
ASN’s IP blocks and applications
ASN’s vibration IP blocks combine the Fourier transform’s time-frequency integration property, data filtering and a specialised high frequency resolution tracking algorithm to implement the ARAHTA (adaptive running speed and harmonics tracking) algorithm. ARAHTA tracks the vibration sensor’s ODR (output data rate) and calculates the motor/pumps running speed using the sensor’s accelerometer sensor data in real-time. ARAHTA’s high resolution and adaptive tracking mechanism results in a typical running speed accuracy of ±1 RPM across the temperature range and sub-mm displacement accuracy using noisy accelerometer data.
ARAHTA’s high accuracy and flexibility ensures that the resulting ML features are high quality and very consistent in the presence of temperature change and load shifts. This has a significant advantage for CbM applications, whereby fingerprinting a spectral profile can be used to assess the degradation of assets of interest. ARAHTA’s high-resolution spectrum forms the basis of providing an AI algorithm with high accuracy feature-rich information, suitable for classification.
Algorithmic performance
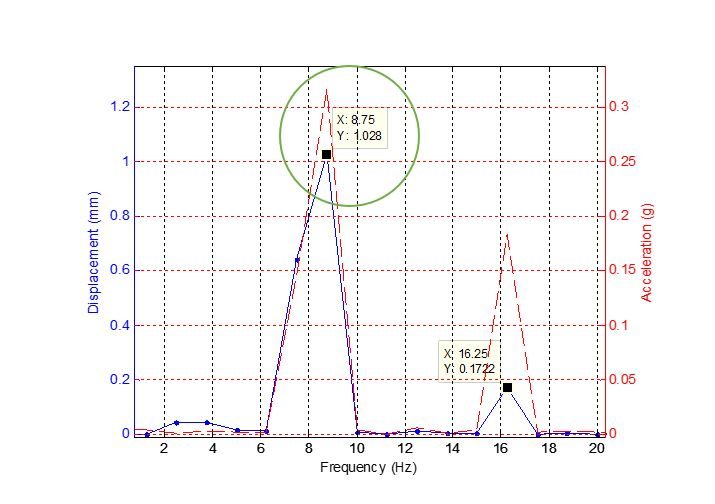
A comparison of the FFT vs the ASN ARAHTA IP blocks is shown below. Setting up a test accelerometer signal comprised of an 8.2Hz sinusoid with amplitude 1gand a few harmonic frequencies at various amplitudes, we can objectively compare the methods.
Analysing Figure 1, notice that the plot shows a comparison of the acceleration spectrum (i.e. the FFT of the acceleration data, shown in red) and the displacement spectrum, shown in blue. Analysing the first peak, notice that as the FFT’s resolution is insufficient, as the algorithm has identified the peak at 8.75Hz, rather than at 8.2Hz. This has a consequence for the amplitude estimation, as the acceleration spectrum amplitude is around 0.34g, rather than the expected 1g. As such, the algorithm incorrectly estimates the displacement at 8.2Hz to be 1mm, rather than 3.69mm.
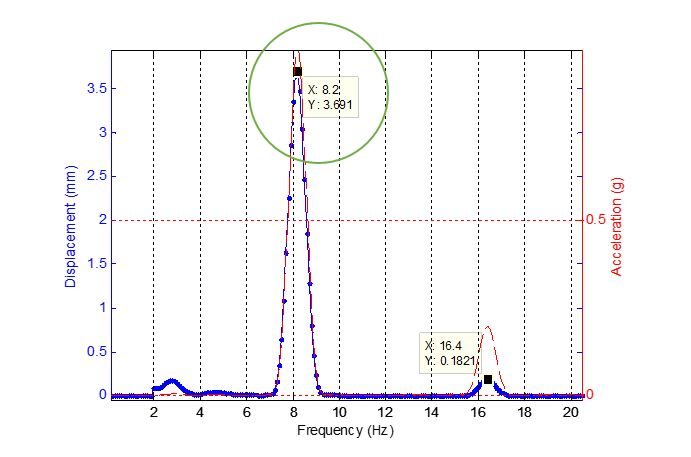
The true value can be seen in Figure 2, where ARAHTA correctly finds the first resonant peak at 8.2Hz and estimates the correct amplitude of 3.69mm.
Figure 1 – Displacement estimate via FFT (frequency resolution: 813.5mHz): wrong frequency and amplitude estimation
Figure 2 – Displacement estimate via ARAHTA (frequency resolution: 10mHz): correct amplitude and frequency estimation.
Get in touch and reduce your asset’s TCO
ASN contactless measurement sensor technology and smart algorithms are an ideal solution for AI based CbM applications. Please contact our CbM expert team to see how we can help you create an effective maintenance programme and reduce your asset’s Total Cost of Ownership.
Sanjeev is a RTEI (Real-Time Edge Intelligence) visionary and expert in signals and systems with a track record of successfully developing over 26 commercial products. He is a Distinguished Arm Ambassador and advises top international blue chip companies on their AIoT/RTEI solutions and strategies for I5.0, telemedicine, smart healthcare, smart grids and smart buildings.
https://www.advsolned.com/wp-content/uploads/2019/12/induction-motor-1500-580-4_compres2.jpg5801500Dr. Sanjeev Sarpalhttps://www.advsolned.com/wp-content/uploads/2021/07/asn_logo_red_met_tekst_helder-e1755353934770.pngDr. Sanjeev Sarpal2022-03-02 17:47:312023-05-12 09:23:54Deploying AI based CbM applications: challenges and algorithmic solutions
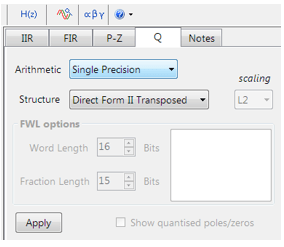
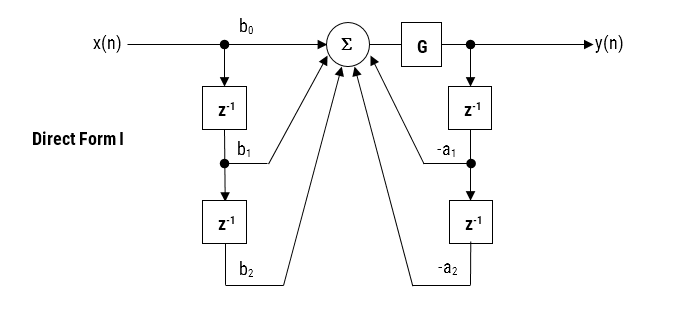
Filter mit unendlicher Impulsantwort (IIR) sind für eine Vielzahl von Sensormessanwendungen nützlich, einschließlich der Entfernung von Messrauschen und der Unterdrückung unerwünschter Komponenten, wie z. B. Stromleitungsstörungen. Obwohl mehrere praktische Implementierungen für den IIR existieren, bietet die Struktur Direct form II Transposed die beste numerische Genauigkeit für die Fließkomma-Implementierung. Wenn jedoch eine Festkomma-Implementierung auf einem Mikrocontroller in Betracht gezogen wird, gilt die Struktur Direkte Form I aufgrund ihres großen Akkumulators, der eventuelle Zwischenüberläufe aufnimmt, als die beste Wahl. Diese Application Note befasst sich speziell mit dem Entwurf und der Implementierung von IIR-Biquad-Filtern auf einem Cortex-M-basierten Mikrocontroller mit dem ASN Filter Designer sowohl für Fließkomma- als auch für Festkomma-Anwendungen über das Arm CMSIS-DSP Software-Framework.
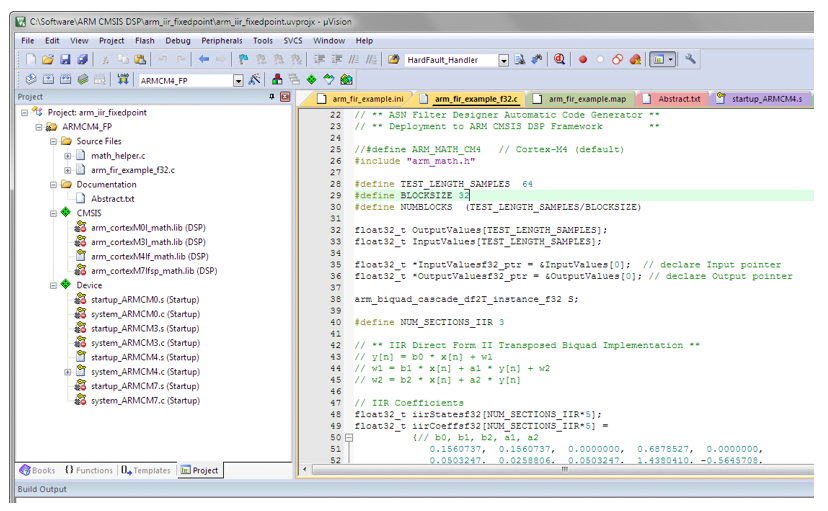
Es werden auch Details (einschließlich eines Referenzbeispielprojekts) zur Implementierung des IIR-Filters in Arm/Keils MDK-Industriestandard-Cortex-M-Mikrocontroller-Entwicklungskit gegeben.
Einführung
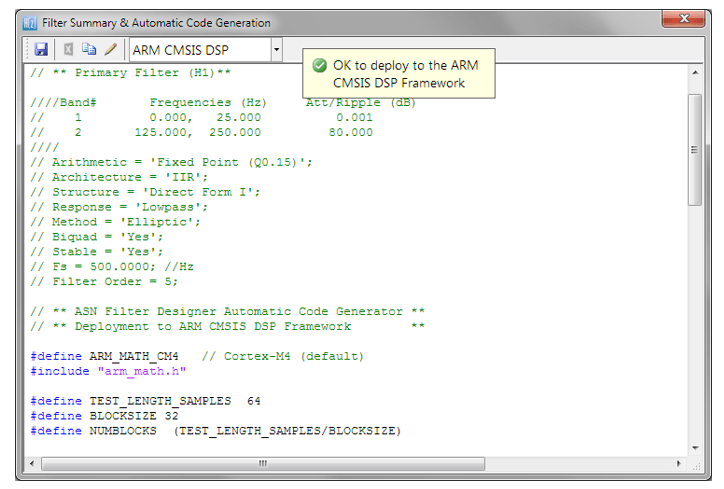
ASN Filter Designer bietet Ingenieuren eine leistungsfähige DSP-Experimentierplattform, die den Entwurf, das Experimentieren und den Einsatz komplexer IIR- und FIR (Finite Impulse Response)-Digitalfilterdesigns für eine Vielzahl von Sensormessanwendungen ermöglicht. Die fortschrittliche Funktionalität des Tools umfasst einen grafikbasierten Echtzeit-Filterdesigner, mehrere Filterblöcke, verschiedene mathematische I/O-Blöcke, symbolisches Live-Mathe-Scripting und Echtzeit-Signalanalyse (über einen integrierten Signalanalysator). Diese Vorteile in Verbindung mit der automatischen Dokumentation und Code-Generierungsfunktionalität ermöglichen es Ingenieuren, ein digitales Filter innerhalb von Minuten statt Stunden zu entwerfen und zu validieren.
Das Arm CMSIS-DSP (Cortex Microcontroller Software Interface Standard) Software-Framework ist eine reichhaltige Sammlung von über sechzig DSP-Funktionen (einschließlich verschiedener mathematischer Funktionen wie Sinus und Kosinus; IIR/FIR-Filterfunktionen, komplexe mathematische Funktionen und Datentypen), die von Arm entwickelt und für die Cortex-M-Prozessorkerne optimiert wurden.
Das Framework macht ausgiebig Gebrauch von hoch optimierten SIMD-Befehlen (Single Instruction, Multiple Data), die mehrere identische Operationen in einem einzigen Befehlszyklus ausführen. Die SIMD-Befehle (sofern vom Core unterstützt) in Verbindung mit anderen Optimierungen ermöglichen es Ingenieuren, schnell und einfach hochoptimierte Signalverarbeitungsanwendungen für Cortex-M-basierte Mikrocontroller zu erstellen.
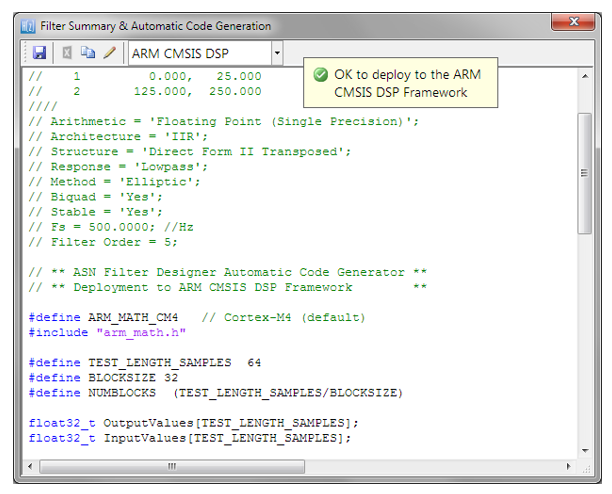
Der ASN Filter Designer unterstützt das CMSIS-DSP Software-Framework vollständig, indem er über seine Code-Generierungs-Engine automatisch optimierten C-Code auf Basis der DSP-Funktionen des Frameworks erzeugt.
Entwurf von IIR-Filtern mit dem ASN Filter Designer
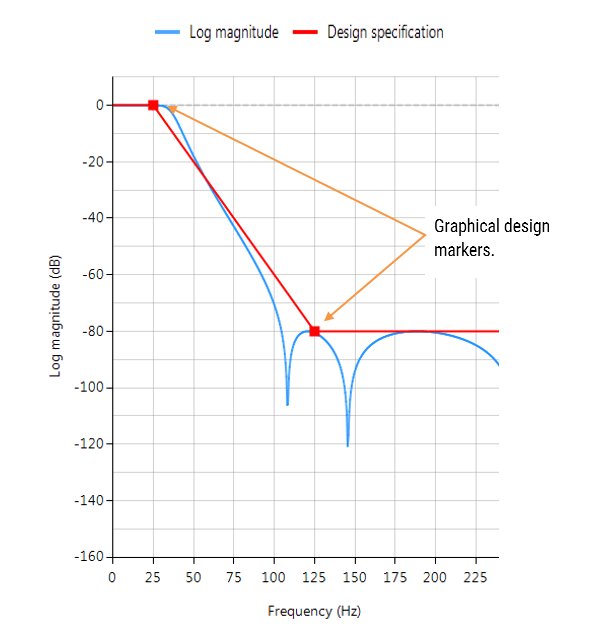
Der ASN Filter Designer bietet Ingenieuren eine einfach zu bedienende, intuitive grafische Design-Entwicklungsplattform für den Entwurf von digitalen IIR- und FIR-Filtern. Das Echtzeit-Entwurfsparadigma des Tools nutzt grafische Entwurfsmarker, die es dem Designer ermöglichen, seine Anforderungen an den Größen-Frequenzgang in Echtzeit einfach zu zeichnen und zu modifizieren, während das Tool automatisch die exakten Spezifikationen für sie ausfüllt.
Betrachten Sie den Entwurf der folgenden technischen Spezifikation:
Fs:
500Hz
Durchlassband-Frequenz:
0-40Hz
Typ:
Tiefpass
Verfahren:
Elliptisch
Sperrbanddämpfung @ 125Hz:
≥ 80 dB
Passband ripple:
< 0.1dB
Ordnung
Klein wie möglich
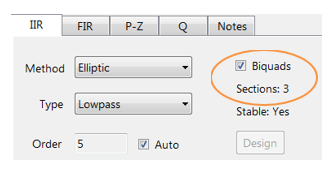
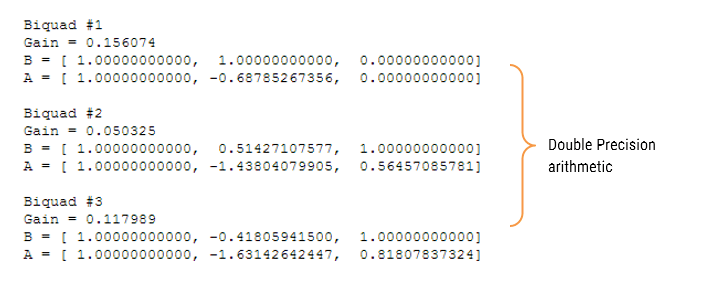
Durch die grafische Eingabe der Spezifikationen in den ASN Filter Designer und die Feinabstimmung der Positionen der Entwurfsmarker entwirft das Tool das Filter automatisch als Biquad-Kaskade (diese Terminologie wird in den folgenden Abschnitten erläutert), wählt automatisch die erforderliche Filterordnung und erzeugt im Wesentlichen automatisch die genaue technische Spezifikation des Filters!
Der Frequenzgang eines elliptischen IIR-Tiefpassfilters 5. Ordnung, der die Spezifikationen erfüllt, ist unten dargestellt:
Dieses Tiefpaßfilter 5. Ordnung bildet die Grundlage für die hier geführte Diskussion.
Biquad-IIR-Filter
Die hier besprochene IIR-Filter-Implementierung wird als Biquad bezeichnet, da sie zwei Pole und zwei Nullstellen hat, wie in Abbildung 1 dargestellt. Die Biquad-Implementierung ist besonders nützlich für Festkomma-Implementierungen, da die Auswirkungen der Quantisierung und der numerischen Stabilität minimiert werden. Der Gesamterfolg jeder Biquad-Implementierung hängt jedoch von der verfügbaren Zahlengenauigkeit ab, die ausreichend sein muss, um sicherzustellen, dass die quantisierten Pole immer innerhalb des Einheitskreises liegen.
Abbildung 1: Direkte Form I (Biquad) IIR-Filterrealisierung und Übertragungsfunktion
Bei der Analyse von Abbildung 1 ist zu erkennen, dass die Biquad-Struktur eigentlich aus zwei Rückkopplungspfaden (skaliert mit \(a_1\) und \(a_2\)), drei Vorwärtspfaden (skaliert mit \(b_0, b_1\) und \(b_2\)) und einer Abschnittsverstärkung \(K\) besteht. Somit kann die Filterfunktion von Abbildung 1 durch die folgende einfache rekursive Gleichung zusammengefasst werden:
Bei der Analyse der Gleichung fällt auf, dass die Biquad-Implementierung nur vier Additionen (die nur einen Akkumulator benötigen) und fünf Multiplikationen erfordert, was auf jedem Cortex-M-Mikrocontroller leicht untergebracht werden kann. Die Abschnittsverstärkung K kann auch vor der Implementierung mit den Vorwärtswegkoeffizienten vormultipliziert werden.
Eine Sammlung von Biquad-Filtern wird als Biquad-Kaskade bezeichnet, wie unten dargestellt.
Der ASN Filter Designer kann eine Kaskade von bis zu 50 Biquads entwerfen und implementieren (nur Professional Edition).
Fließkomma-Implementierung
Bei der Implementierung eines Filters in Fließkomma (d. h. unter Verwendung von Arithmetik mit doppelter oder einfacher Genauigkeit) gelten Direct Form II-Strukturen als bessere Wahl als die Direct Form I-Struktur. Die Direct Form II Transposed-Struktur gilt als die numerisch genaueste für die Fließkomma-Implementierung, da die unerwünschten Effekte der numerischen Übersättigung minimiert werden, wie bei der Analyse der Differenzgleichungen zu sehen ist.
Abbildung 2 – Direct Form II Transposed-Struktur, Übertragungsfunktion und Differenzengleichungen
Die Filter Zusammenfassung (siehe Abbildung 3) bietet dem Designer einen detaillierten Überblick über das entworfene Filter, einschließlich einer ausführlichen Zusammenfassung der technischen Spezifikationen und der Filterkoeffizienten, was einen schnellen und einfachen Weg zur Dokumentation Ihres Entwurfs darstellt.
Der ASN Filter Designer unterstützt den Entwurf und die Implementierung sowohl von Single Section als auch von Biquad (Standardeinstellung) IIR-Filtern. Da das CMSIS-DSP-Framework jedoch keine direkte Unterstützung für Single Section IIR-Filter bietet, wird diese Funktion in dieser Application Note nicht behandelt.
Die Implementierung des CMSIS-DSP-Software-Frameworks erfordert die Vorzeicheninversion (d. h. das Umkehren des Vorzeichens) der Rückkopplungskoeffizienten. Um dies zu ermöglichen, kehrt die automatische Code-Generierungs-Engine des Tools das Vorzeichen der Rückkopplungskoeffizienten bei Bedarf automatisch um. In diesem Fall wird der Satz von Differenzgleichungen zu,
Automatische Code-Generierung für Arm-Prozessorkerne über CMSIS-DSP
Die automatische Code-Generierungs-Engine des ASN Filter Designers erleichtert den Export eines entworfenen Filters auf Cortex-M Arm-basierte Prozessoren über das CMSIS-DSP Software-Framework. Die integrierten Analyse- und Hilfefunktionen des Tools unterstützen den Designer bei der erfolgreichen Konfiguration des Designs für den Einsatz.
Alle Entwürfe von Fließkomma-IIR-Filtern müssen auf Single-Precision-Arithmetik und entweder auf einer Direct Form I oder Direct Form II Transposed-Filterstruktur basieren. Wie im vorherigen Abschnitt beschrieben, wird die Direct Form II Transposed-Struktur aufgrund ihrer höheren numerischen Genauigkeit für die Fließkomma-Implementierung befürwortet.
Die Einstellungen für Quantisierung und Filterstruktur finden Sie unter der Registerkarte Q (wie links dargestellt). Durch Einstellen von Arithmetic auf Single Precision und Structure auf Direct Form II Transposed und Klicken auf die Schaltfläche Apply wird die hier betrachtete IIR für das Software-Framework CMSIS-DSP konfiguriert.
Wählen Sie das Arm CMSIS-DSP-Framework aus der Auswahlbox im Filterübersichtsfenster aus:
Der automatisch generierte C-Code auf Basis des CMSIS-DSP-Frameworks für die direkte Implementierung auf einem Arm-basierten Cortex-M-Prozessor ist unten dargestellt:
Wie man sieht, generiert der automatische Code-Generator den gesamten Initialisierungscode, die Skalierung und die Datenstrukturen, die für die Implementierung des IIR über die CMSIS-DSP-Bibliothek benötigt werden. Dieser Code kann direkt in jedem Cortex-M-basierten Entwicklungsprojekt verwendet werden – ein vollständiges Keil-MDK-Beispiel ist auf der Website von Arm/Keil verfügbar. Beachten Sie, dass der Code-Generator des Werkzeugs standardmäßig Code für den Cortex-M4-Kern erzeugt. Bitte entnehmen Sie der folgenden Tabelle die #define-Definition, die für alle unterstützten Kerne erforderlich ist.
ARM_MATH_CM0
Cortex-M0 core.
ARM_MATH_CM4
Cortex-M4 core.
ARM_MATH_CM0PLUS
Cortex-M0+ core.
ARM_MATH_CM7
Cortex-M7 core.
ARM_MATH_CM3
Cortex-M3 core.
ARM_MATH_ARMV8MBL
ARMv8M Baseline target (Cortex-M23 core).
ARM_MATH_ARMV8MML
ARMv8M Mainline target (Cortex-M33 core).
Die automatische Code-Generierung von IIR-Filtern mit komplexen Koeffizienten wird derzeit nicht unterstützt.
Implementieren des Filters im Arm Keil’s MDK
Wie im vorherigen Abschnitt erwähnt, kann der vom Arm CMSIS-DSP Code-Generator erzeugte Code direkt in jedem Cortex-M-basierten Entwicklungsprojekt-Tooling verwendet werden, wie z. B. Arm Keils Industriestandard μVision MDK (Mikrocontroller-Entwicklungskit).
Ein komplettes μVision-Beispiel-IIR-Biquad-Filterprojekt kann von Keils Website heruntergeladen werden und ist, wie unten zu sehen, so einfach wie das Kopieren und Einfügen des Codes und das Vornehmen kleiner Anpassungen am Code.
Das Beispielprojekt nutzt die leistungsstarken Simulationsmöglichkeiten von μVision und ermöglicht die Evaluierung des IIR-Filters auf M0-, M3-, M4- bzw. M7-Cores. Als zusätzlicher Bonus kann auch der Logik-Analysator von μVision verwendet werden, so dass Vergleiche zwischen dem Signal-Analysator des ASN Filter Designers und der Realität auf einem Cortex-M-Kern möglich sind.
Festkomma-Implementierung
Wie bereits erwähnt, ist die direkte Form I-Filterstruktur die beste Wahl für die Festkomma-Implementierung. Vor der Implementierung der Differenzgleichung auf einem Festkommaprozessor müssen jedoch einige wichtige Überlegungen zur Datenskalierung berücksichtigt werden. Da das CMSIS-DSP-Framework nur die Datentypen Q15 und Q31 für IIR-Filter unterstützt, bezieht sich die folgende Diskussion auf eine Implementierung auf einer 16-Bit-Wort-Architektur, d. h. auf Q15.
Quantisierung
Um die Koeffizienten und Ein-/Ausgangszahlen korrekt darzustellen, wird die Systemwortlänge (16 Bit für die Zwecke dieser Application Note) zunächst in ihre Anzahl an Ganzzahlen und Nachkommastellen aufgeteilt. Das allgemeine Format ist gegeben durch:
Q Num of Integers.Fraction length
Wenn wir annehmen, dass alle Datenwerte innerhalb eines Maximal-/Minimalbereichs von \(\pm 1\) liegen, können wir das Format Q0.15 verwenden, um alle Zahlen entsprechend darzustellen. Beachten Sie, dass das Q0.15-Format (oder einfach Q15) ein Maximum von \(\displaystyle 1-2^{-15}=0.9999=0x7FFF\) und ein Minimum von \(-1=0x8000\) (Zweierkomplement-Format) darstellt.
Der ASN Filter Designer kann für die Festkomma-Q15-Arithmetik konfiguriert werden, indem die Spezifikationen für die Wortlänge und die Fraktale Länge in der Registerkarte Q eingestellt werden (siehe Abschnitt Konfiguration für die Details). Ein offensichtliches Problem, das sich bei Biquads zeigt, ist jedoch der Zahlenbereich der Koeffizienten. Da Pole überall innerhalb des Einheitskreises platziert werden können, wird das resultierende Polynom, das für die Implementierung benötigt wird, oft im Bereich \(\pm 2\) liegen, was eine Q14-Arithmetik erfordern würde. Um dieses Problem zu umgehen, werden alle Zähler- und Nennerkoeffizienten über einen biquadischen Post-Scaling-Faktor skaliert, wie unten beschrieben.
Post-Scaling-Faktor
Um sicherzustellen, dass die Koeffizienten in die Spezifikationen für die Wortlänge und die fraktionale Länge passen, enthalten alle IIR-Filter einen Post-Scaling-Faktor, der die Zähler- und Nennerkoeffizienten entsprechend skaliert. Als Folge dieser Skalierung muss der Post-Scaling-Faktor in die Filterstruktur einbezogen werden, um einen korrekten Betrieb zu gewährleisten.
Das Konzept der Post-Scaling wird im Folgenden für eine Biquad-Implementierung der direkten Form I dargestellt.
Abbildung 4: Direkte Form I-Struktur mit Post-Scaling
Durch Vormultiplikation der Zählerkoeffizienten mit der Querschnittsverstärkung \(K\) kann nun jeder Koeffizient mit \(G\) skaliert werden, d. h. \(\displaystyle b_0=\frac{b_0}{G}, b_1=\frac{b_1}{G}, a_1=\frac{a_1}{G}, a_2=\frac{a_2}{G}\) usw. Daraus ergibt sich nun die folgende Differenzengleichung:
Alle im Tool implementierten IIR-Strukturen beinhalten das Konzept des Post-Scaling-Faktors. Diese Skalierung ist für die Implementierung über das Arm CMSIS-DSP-Framework obligatorisch – weitere Details finden Sie im Abschnitt “Konfiguration”.
Verstehen der Filterzusammenfassung
Um die in der ASN Filter Designer Filterzusammenfassung dargestellten Informationen vollständig zu verstehen, zeigt das folgende Beispiel die Filterkoeffizienten, die mit Double Precision Arithmetik und mit Fixed Point Q15 Quantisierung erhalten wurden.
Anwendung der Festkomma-Q15-Arithmetik (beachten Sie die Auswirkungen der Quantisierung auf die Koeffizientenwerte):
Konfigurieren des ASN Filter Designers für Festkomma-Arithmetik
Um ein IIR-Fixed-Point-Filter über das CMSIS-DSP-Framework zu implementieren, müssen alle Designs auf der Fixed-Point-Arithmetik (entweder Q15 oder Q31) und der Direct-Form-I-Filterstruktur basieren.
Die Einstellungen für Quantisierung und Filterstruktur finden Sie unter der Registerkarte Q (wie links dargestellt): Wenn Sie Arithmetic auf Fixed Point und Structure auf Direct Form I einstellen und auf die Schaltfläche Apply klicken, wird die hier betrachtete IIR für das CMSIS-DSP-Software-Framework konfiguriert.
Der Post-Scaling-Faktor ist im CMSIS-DSP-Software-Framework tatsächlich als \( \log_2 G\) implementiert (d. h. eine nach links verschobene Skalierungsoperation, wie in Abbildung 4 dargestellt).
Eingebaute Analytik: Das Tool analysiert automatisch die Filterkoeffizienten der Kaskade und wählt einen geeigneten Skalierungsfaktor. Wie oben zu sehen, ist der größte Minimalwert -1,63143, daher ist ein Post-Scaling-Faktor von 2 erforderlich, um alle Koeffizienten in die Q15-Arithmetik “einzupassen”.
Vergleich von Spektren, die durch unterschiedliche Rechenregeln erhalten wurden
Um die Übersichtlichkeit und die allgemeine Berechnungsgeschwindigkeit zu verbessern, zeigt der ASN Filter Designer nur Spektren (d.h. Magnitude, Phase usw.) an, die auf den aktuellen arithmetischen Regeln basieren. Dies ist etwas anders als bei anderen Werkzeugen, die Multispektren anzeigen, die durch (z. B.) Festkomma– und Doppelpräzisionsarithmetik erhalten wurden. Für alle Benutzer, die Spektren vergleichen möchten, können Sie einfach zwischen den arithmetischen Einstellungen wechseln, indem Sie die Arithmetic methode ändern. Der Designer berechnet dann automatisch die Filterkoeffizienten unter Verwendung der gewählten Rechenregeln und der aktuellen technischen Spezifikation neu. Das Diagramm wird dann unter Verwendung der aktuellen Zoom-Einstellungen aktualisiert.
Automatische Code-Generierung für das Arm CMSIS-DSP-Framework
Wie bei der Fließkomma-Arithmetik wählen Sie das Arm CMSIS-DSP-Framework aus der Auswahlbox im Filter-Übersichtsfenster aus:
Der automatisch generierte C-Code auf Basis des CMSIS-DSP-Frameworks für die direkte Implementierung auf einem Arm-basierten Cortex-M-Prozessor ist unten dargestellt:
Wie beim Fließkommafilter generiert der automatische Code-Generator den gesamten Initialisierungscode, die Skalierung und die Datenstrukturen, die zur Implementierung des IIR über die CMSIS-DSP-Bibliothek benötigt werden. Dieser Code kann direkt in jedem Cortex-M-basierten Entwicklungsprojekt verwendet werden – ein vollständiges Keil-MDK-Beispiel ist auf der Website von Arm/Keil verfügbar. Beachten Sie, dass der Code-Generator des Werkzeugs standardmäßig Code für den Cortex-M4-Kern erzeugt. Bitte entnehmen Sie der folgenden Tabelle die #define -Definition, die für alle unterstützten Kerne erforderlich ist.
ARM_MATH_CM0
Cortex-M0 core.
ARM_MATH_CM4
Cortex-M4 core.
ARM_MATH_CM0PLUS
Cortex-M0+ core.
ARM_MATH_CM7
Cortex-M7 core.
ARM_MATH_CM3
Cortex-M3 core.
ARM_MATH_ARMV8MBL
ARMv8M Baseline target (Cortex-M23 core).
ARM_MATH_ARMV8MML
ARMv8M Mainline target (Cortex-M33 core).
Der Hauptcode der Testschleife (nicht gezeigt) dreht sich um die Funktion arm_biquad_cascade_df2T_f32(), die die Filterung eines Blocks von Eingangsdaten durchführt.
IIR-Filter mit komplexen Koeffizienten werden derzeit nicht unterstützt.
Validierung des Entwurfs mit dem Signal Analyser
Ein Entwurf kann mit dem Signal Analyser validiert werden, wobei sowohl Zeit- als auch Frequenzbereichsdiagramme unterstützt werden. Ein umfassender Signalgenerator ist vollständig in den Signalanalysator integriert, so dass die Entwickler ihre Filter mit einer Vielzahl von Eingangssignalen testen können, wie z. B. Sinuswellen, weißes Rauschen oder sogar externe Testdaten.
Für Festkomma-Implementierungen erlaubt das Tool den Entwicklern, die Overflow-Arithmetikregeln als: Saturate oder Wrap. Außerdem kann die Accumulator Word Length zwischen 16 und 40 Bit eingestellt werden, so dass die Entwickler schnell die optimalen Einstellungen für ihre Anwendung finden können.
Zusätzliche Ressourcen
Digital signal processing: principles, algorithms and applications, J.Proakis and D.Manoloakis
Digital signal processing: a practical approach, E.Ifeachor and B.Jervis.
Digital filters and signal processing, L.Jackson.
Step by step video tutorial of designing an IIR and deploying it to Keil MDK uVision.
Implementing Biquad IIR filters with the ASN Filter Designer and the Arm CMSIS-DSP software framework (ASN-AN025)
https://www.advsolned.com/wp-content/uploads/2020/04/asn25_DFI.png331867ASN consultancy teamhttps://www.advsolned.com/wp-content/uploads/2021/07/asn_logo_red_met_tekst_helder-e1755353934770.pngASN consultancy team2021-05-17 14:20:262021-05-17 14:37:02Implementierung von Biquad-IIR-Filtern mit dem ASN Filter Designer und dem Arm CMSIS-DSP Software Framework
Advanced Solutions Nederland is blij te kunnen aankondigen dat het ASN Filter Designer Arm MDK5 software pack nu via Keil beschikbaar is om te downloaden! Het filterpakket biedt MDK-gebruikers een eenvoudige manier om het IP van ASN te gebruiken.
Keil MDK is de meest uitgebreide oplossing voor software-ontwikkeling voor Arm-gebaseerde microcontrollers. Voor MDK worden extra softwarecomponenten en ondersteuning voor microcontroller devices geleverd door softwarepakketten. Download hier
DSP voor ingenieurs: de ASN Filter Designer is de ideale tool om de sensordata snel te analyseren en te filteren. Maak een algoritme binnen enkele uren in plaats van dagen. Wanneer u met sensorgegevens werkt, herkent u deze uitdagingen waarschijnlijk:
Mijn sensordatasignalen zijn te zwak om zelfs maar een analyse te maken. Daarom heb ik versterking van de signalen nodig
Waar ik een vlakke lijn zou verwachten, zien de gegevens eruit als een puinhoop door interferentie en andere vervuiling. Ik moet de gegevens eerst opschonen voordat ik ze analyseer.
Waarschijnlijk heb je tot nu toe dagen of zelfs weken gewerkt aan signaalanalyse en filtering. Het ontwikkelingstraject is over het algemeen langzaam en zeer pijnlijk. Denk maar eens aan het aantal uren dat je had kunnen besparen als je een ontwerptool had gehad die alle algoritmische details voor jou beheerde. ASN Filter Designer is een standaardoplossing voor de industrie die wordt gebruikt door duizenden professionele ontwikkelaars die wereldwijd aan iot-projecten werken.
Onze nauwe samenwerking met Arm en ST zorgt ervoor dat alle ontworpen filters 100% compatibel zijn met alle Arm Cortex-M processoren, zoals de populaire STM32-familie van ST.
Uitdagingen voor ingenieurs
90% van IoT smart sensors zijn gebaseerd op Arm Cortex-M processor technologie
Sensor signal processing is moeilijk
Sensoren hebben moeite met interferentie en allerlei ongewenste componenten
Hoe ontwerp ik een filter dat voldoet aan mijn requirements?
Hoe kan ik mijn ontworpen filter controleren op testdata?
Voor betere product performance is schone sensor data nodig
Tijdrovend proces om een filter op een embedded processor te implementeren
Tijd is geld!
Ontwerpers verzanden vaak met traditionele tooling. Deze vereist meestal een iteratieve, trial and error aanpak of deskundige kennis. Met deze aanpak gaat kostbare tijd verloren. ASN Filter Designer helpt u met een interactieve ontwerpmethode. Hierbij voert de tool automatisch de technische specificaties in op basis van eisen die de gebruiker grafisch heeft ingevoerd.
Snelle ontwikkeling van het DSP-algoritme
Volledig gevalideerd filterontwerp: geschikt voor toepassing in DSP, Arm microcontroller, FPGA, ASIC of PC-toepassing
Automatische gedetailleerde ontwerpdocumentatie: de Filter Designer helpt je met documenatie, waardoor je de peer review kunt versnellen en projectrisico’s verlaagt
Eenvoudige overdracht: projectdossier, documentatie en testresultaten bieden een gemakkelijk manier voor overdracht aan collega’s of andere teams
Gemakkelijk in te passen in nieuwe scenario’s: het ontwerp kan eenvoudig worden aangepast aan andere eisen en scenario’s, zoals 60Hz interferentieonderdrukking op de voedingslijn, in plaats van de Europese 50Hz.
ASN Filter Designer: de snelle en intuitieve filter designer
De ASN Filter Designer is het ideale hulpmiddel om sensorgegevens snel te analyseren en filteren. Indien nodig kun je jouw gegevens eenvoudig naar tools als Matlab en Python exporteren voor verdere analyse. Daarom is het ideaal voor ingenieurs die een krachtige tool voor signaalanalyse nodig hebben en een datafilter voor hun IOT-toepassing moeten maken. Zeker als je af en toe een datafilter moet maken. Vergeleken met andere tools creeer je een algoritme binnen enkele uren in plaats van dagen.
Exporteer jouw algoritmes naar Matlab, Python of een Arm microcontroller
Je kunt veel tijd besparen doordat je met ASN Filter Designer algoritmes eenvoudig kunt implementeren in Matlab, Python of direct op een Arm-microcontroller omdat de Filter Designer automatisch code generateert.
Onmiddelijke verlichting
Denk eens aan het aantal uren dat je had kunnen besparen als je een ontwerptool had gehad die alle algoritmische details voor je beheerde.
ASN Filter Designer is een standaardoplossing in de sector die wordt gebruikt door duizenden professionele ontwikkelaars die wereldwijd aan ivd-projecten werken. Onze nauwe samenwerking met Arm en ST zorgt ervoor dat alle filters 100% compatibel zijn met alle Arm Cortex-M processoren.
Hoeveel pijnverzachting kun je voor 145 Euro kopen?
Omdat veel technici onze ASN Filterontwerper voor korte tijd nodig hebben, is een licentie van 145 euro voor slechts 3 maanden mogelijk!
Vraag jezelf maar af: is 145 Euro een eerlijke prijs om te betalen voor onmiddellijke pijnverlichting en resultaat? Wij denken van wel. Bovendien hebben we een licentie voor 1 jaar en zelfs een eeuwigdurende licentie. Download de demo om het zelf te zien of neem contact met ons op voor meer informatie