Many IoT applications use a sinewave for estimating the amplitude of an entity of interest – some examples include:
Measuring material fatigue/strain with a loadcell – in vehicle and bridge/building applications measuring material fatigue and strain is essential for safety. An AC sinusoidal excitation overcomes the difficulty of dealing with instrumentation electronics DC offsets.
Calibrating CT (current transformers) sensors channels – a sinusoid of known amplitude is applied to channel input and the output amplitude is measured.
Measuring gas concentration in infra-red gas sensors – the resulting sinusoid’s amplitude is used to provide an estimate of gas concentration.
Measuring harmonic amplitudes in power quality smart grids applications – in 50/60Hz power systems, certain harmonic amplitudes are of interest.
ECG biomedical compliance testing – channel compliance with IEC regulations needed for FDA testing typically uses a set of sinewaves at known amplitudes, to ensure that the channel amplitude error is within specification.
In a previous article, we discussed how differentiation could be used to find the peaks and troughs of sinewave, i.e. finding the zero crossing points. However, a much more traditional approach has been to use fullwave rectification, whereby a non-linear operator and lowpass filtering are employed. The concept used is described below:
Remove any DC or low-frequency offsets via a highpass filter.
Apply a non-linear operator via an abs() or sqr() non-linear operator.
Lowpass filter the result to obtain an estimate of the sinusoid’s amplitude.
Scale the amplitude.
Although this sounds easy, care should be taken to understand the effects of how the non-linear operator alters the waveform and affects the estimation of amplitude using lowpass filtering.
IoT application
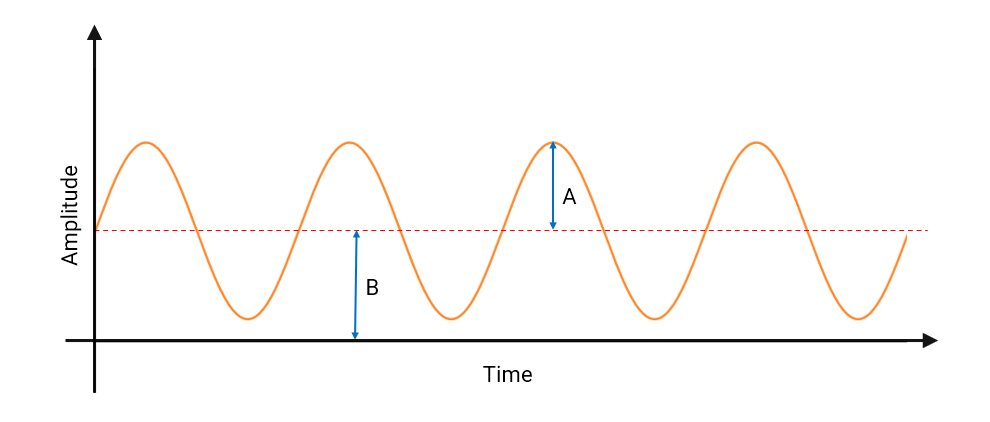
A typical IoT application using a sinusoid is shown below:
Where, \(f_o\) is the frequency of oscillation and \(A\) is the amplitude of sinusoid respectively. Notice that the sinusoid is non-linear and symmetrical around the offset, \(B\). Notice also that it has a peak-to-peak amplitude of \(2A\), since specifying an amplitude \(A\) results in a bipolar amplitude of \(±A\). As many microcontrollers employ low-cost unipolar ADCs, the bipolar sinusoid needs to be offset by a DC offset, \(B\) (usually achieved by a resistor network) to ensure that the signal remains within the common-mode range of the ADC input.
As mentioned above, before applying the non-linear operator any DC offsets need to be removed. This can easily be achieved with either an IIR or FIR highpass filter. If using an IIR filter, it should be noted that the filter’s phase and group delay (latency) will significantly increase at the cut-off frequency, so a degree of experimentation is required to find a good trade-off.
After highpass filtering the data, we can apply the non-linear operator. Two popular operators are the abs()and sqr()operators.
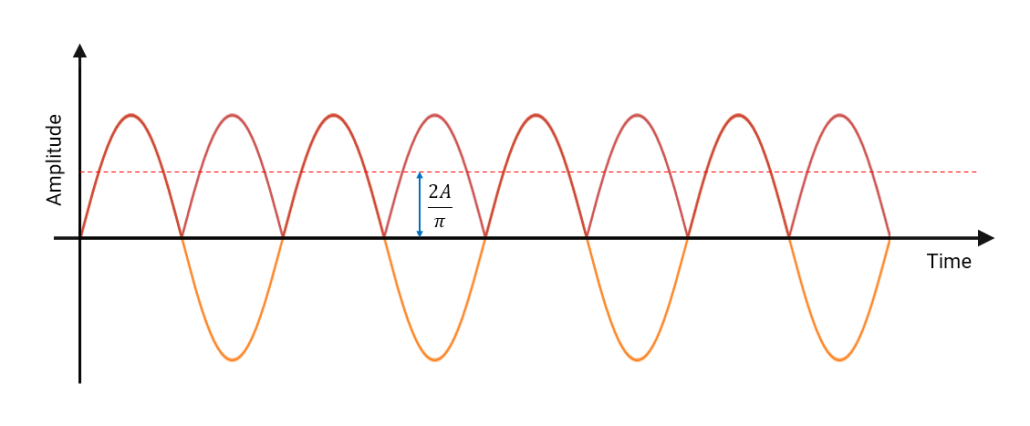
Using the abs()operator, the Fourier series of \(\left|A \,sin(2\pi f_ot)\right|\) is shown below:
Analysing the equation, it can be seen that the abs() operation doubles the frequency and that the DC component is actually \(\frac{2A}{\pi}\), as illustrated below.
As seen, lowpass filtering this result in its current form will produce an amplitude estimate of \(\frac{2A}{\pi}\) (dashed red line), which is clearly incorrect for estimating the sinewave’s amplitude, \(A\). However, this can be simply remedied by scaling the amplitude estimates by \(\frac{\pi}{2}\), which removes the bias, leaving the sinewave’s amplitude, \(A\).
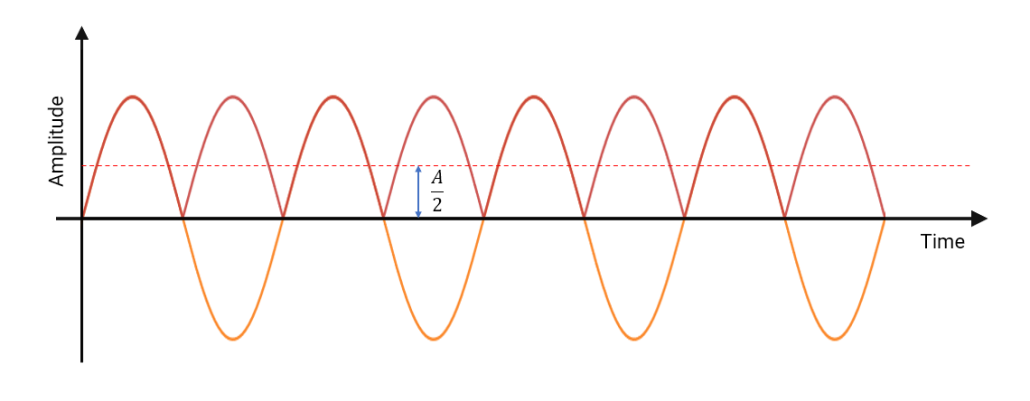
Likewise, for a sqr() operator, we can define the resulting waveform using trigonometrical identities, i.e.
Lowpass filtering this signal requires a correction scaling factor of 2.
Lowpass filter
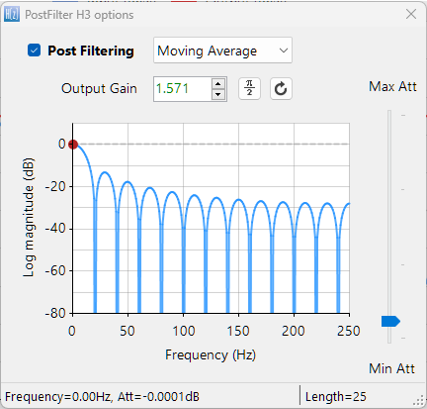
Although any lowpass filter will suffice, the moving average filter is used by most developers by virtue of its computational simplicity and noise reduction characteristics. A more detailed explanation of moving average filters can be found here.
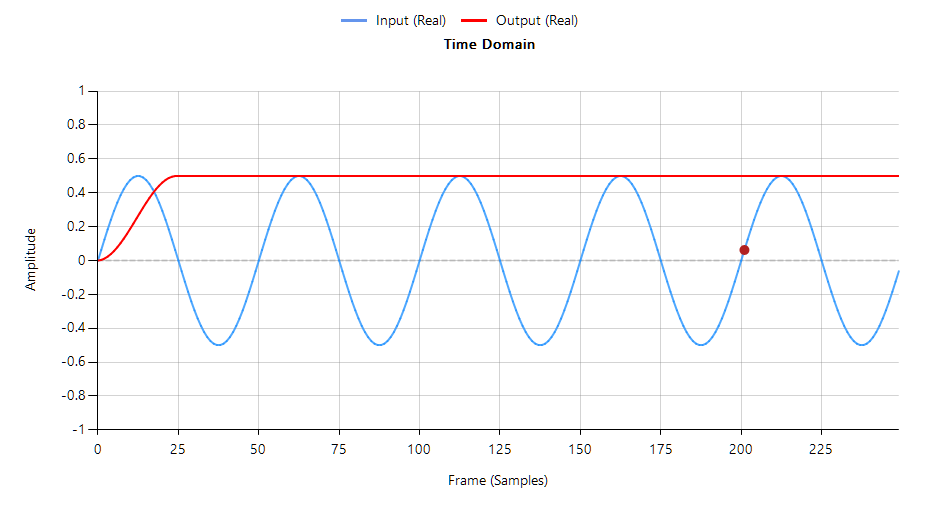
A 24th order moving average filter with a post gain of \(\frac{\pi}{2}\) or 1.571 is shown below.
Applying this moving average filter to a sinewave \(f_o=10Hz, A=0.5\), sampled at 500Hz processed with the abs()operator we obtain the following:
As seen, the amplitude estimation of the sinusoid using a lowpass filter and the \(\frac{\pi}{2}\) scaling factor is now correct. However, for real world applications that contain noise, it is considered to be more accurate to measure the RMS amplitude, in which case the scaling factor becomes \(\frac{\pi}{2\sqrt 2} \).
Note that these scaling factors are only valid for sinusoidal scaling. If your waveform is non-sinusoidal (e.g. triangular or square or affected by harmonics) another scaling factor/method will be required, as discussed below.
True RMS
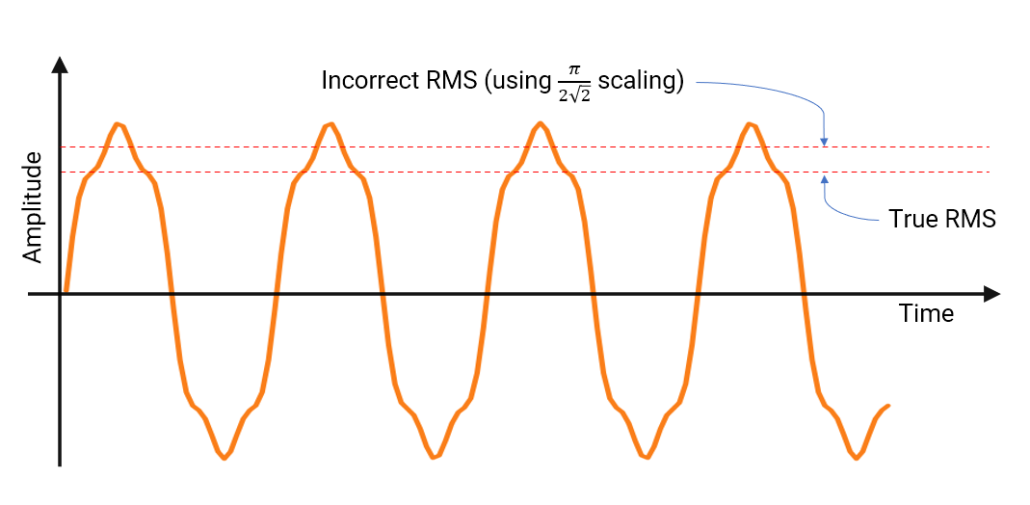
In practice, many sinusoidal waveforms will be affected by harmonics (e.g. smart grid power systems) which will alter the shape of the main sinusoid and offset the RMS estimate using the \(\frac{\pi}{2\sqrt 2} \) scaling factor concept.
A much better method is to calculate the True RMS, whereby the sqr() operator is used for the full wave rectification, but this time a sqrt() function is used for scaling after the lowpass operation. The results of the two methods are shown below, where it can be seen that the True RMS method correctly estimates the signal’s RMS amplitude.
Sanjeev is a RTEI (Real-Time Edge Intelligence) visionary and expert in signals and systems with a track record of successfully developing over 26 commercial products. He is a Distinguished Arm Ambassador and advises top international blue chip companies on their AIoT/RTEI solutions and strategies for I5.0, telemedicine, smart healthcare, smart grids and smart buildings.
AIoT is an exciting new area that combines AI concepts (i.e. ML) with IoT in order to produce state-of-the-art smart embedded solutions. This augmentation of technologies requires a new set of tools to capture real-time IoT sensor data, analyse it, design suitable algorithms and then perform validation of the solution. After completing validation of the algorithms on the test data, a final hurdle is then how to generate efficient C code of the developed algorithm(s) for an Arm Cortex-M microcontroller for use in an application. These concepts will be discussed herein.
Arm’s Synchronous Data Stream (SDS) Framework provides developers with an easy method of capturing and playing back real-time sensor data for embedded AIoT sensor applications on Arm Cortex-M processors, such as ST Microelectronics’ very popular STM32 family.
The SDS Framework provides embedded developers with a variety of essential tools, such as the ability to record real-world sensor data for analysis and development in tools such as ASN Filter Designer, Python and Matlab. A set of Python utility scripts are available for recording, playback, visualisation and data conversion, where the latter supports the conversion of captured SDS data files into a single CSV file – providing a simple bridge between the ASN Filter Designer and the SDS Framework.
The SDS framework also supports the possibility to playback real-world data for algorithm validation using Arm Virtual Hardware, allowing developers to verify execution of DSP algorithms on Cortex-M targets with off-line tools.
This application note provides AIoT developers with a complete reference guide of how to develop and deploy feature extraction algorithms for use in AIoT applications to STM32 Arm Cortex-M based microcontrollers using STM32CubeIDE or Keil mVision with the Arm SDS framework and ASN Filter Designer. As mentioned above, AIoT system challenges and concepts will also be covered.
Building AIoT systems
Almost all IoT embedded sensor applications require some level of signal processing to enhance sensor data and extract features of interest. However, an obvious hurdle for many developers is how to design, test and deploy efficient algorithms for their application. This is easier said than done, as many software engineers are not well-versed in understanding the mathematical concepts needed to implement algorithms. This is further complicated by the challenge of how to implement algorithms developed by researchers that are not interested/experienced in developing real-time embedded applications.
A possible solution offered by the Mathworks (Embedded Coder) automatically translates Matlab algorithms and functions into C for Arm processors, but its high price tag and steep learning curve make it unattractive for many.
That being said, Arm and its rich ecosystem of partners provide developers with extensive easy-to-use tooling and tried and tested software libraries. Arm’s CMSIS-DSP and CMSIS-NN frameworks for algorithm development and machine learning (ML) are two very popular examples that are open source and are used internationally by tens of thousands of developers.
The Arm CMSIS-DSP software framework is particularly interesting as it provides IoT developers with a rich collection of fast mathematical and vector functions, interpolation functions, digital filtering (FIR/IIR) and adaptive filtering (LMS) functions, motor control functions (e.g. PID controller), complex math functions and supports various data types, including fixed and floating point. The important point to make here is that all of these functions have been optimised for Arm Cortex-M processors, allowing you to focus on your application rather than worrying about optimisation.
The Arm-CMSIS framework solutions are strengthened by Arm partners ASN and Qeexo who provide developers with easy-to-use real-time filtering, feature extraction (ASN Filter Designer) and ML tooling (AutoML) and reference designs, expediting the development of AIoT applications, including industrial, audio and biomedical. These solutions have been optimised for Arm processors with the help of Arm’s architecture experts and insider knowledge of compiler workings.
AIoT system building blocks
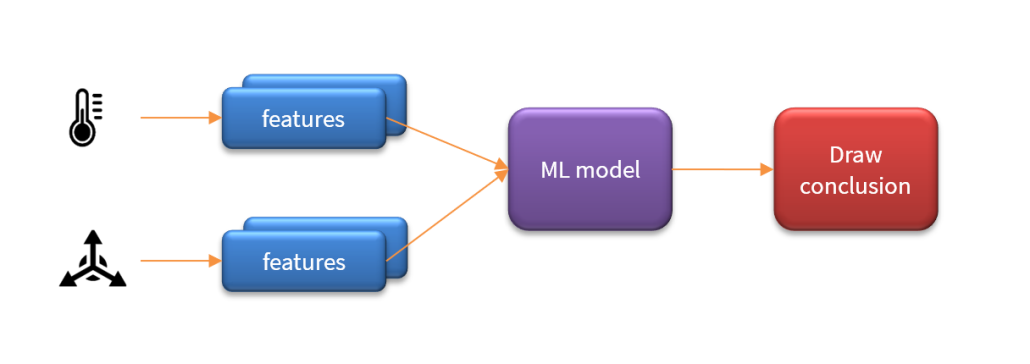
An essential pre-building block in any AIoT system is the feature extraction algorithm. The challenge for any feature extraction algorithm is to extract and enhance any relevant sensor data features in noisy or undesirable circumstances and then pass them onto the ML model in order to provide an accurate classification. The concept is illustrated below:
As seen above, an AIoT system may actually contain multiple feature blocks per sensor and in some cases fuse the features locally before sending them onto the ML model for classification such that the system may then draw a conclusion. The challenge is therefore how to capture sensor data for training and design suitable algorithms to extract features of interest.
Feature extraction algorithms: challenges and solutions
The challenge for any feature extraction algorithm is to extract and enhance any relevant data features in noisy data or undesirable circumstances and then pass them onto the ML model in order to provide an accurate classification. Unfortunately, many ML models perform badly, due to poor quality data and insufficient training data. An obvious challenge for AIoT is how do we obtain the training data in the first place? In many cases, this is extremely challenging as data pertaining to faults (such as preventive maintenance) is hard to come by, as many plant managers are reluctant to break their working production lines or processes to provide developers with training data.
In the absence of adequate training data, feature extraction based on science and mathematics is a prudent alternative, as less training data is required, and in general, the quality of the feature estimate is higher as knowledge of the underlying process is used. Examples include: obtaining accurate pulse and heart rate estimates from ECG and PPG sensors in smartwatch applications when a subject is moving. For industrial sensors, such as loadcells, pressure, temperature, gas and accelerometer sensors the challenge is amplified, as harsh operating conditions and the sheer variety of the applications needed for I4.0 process control applications complicate the design significantly.
Example: Infrared gas sensor
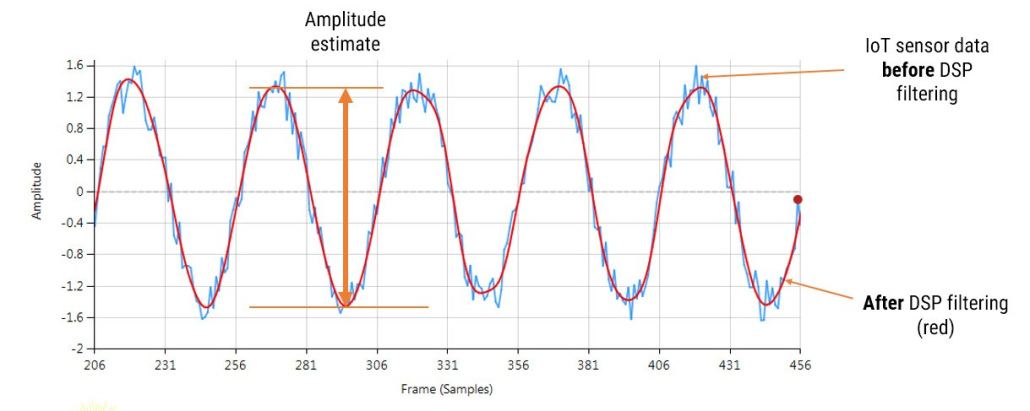
Consider the following application for gas concentration measurement from an Infrared gas sensor. The requirement is to determine the peak-to-peak amplitude of the sinusoid in order to get an estimate of gas concentration – where the bigger amplitude is the higher the gas concentration will be.
Analysing the Figure, it can be seen that the sinusoid is corrupted with measurement noise (shown in blue), and any estimate based on the blue signal will have a high degree of uncertainty about it – which is not very useful for getting an accurate reading of gas concentration! After cleaning the sinusoid with a digital filter (red line), we obtain a much more accurate and usable signal for our gas concentration estimation challenge. But how do we obtain the amplitude?
Knowing that the gradient at the peaks is zero, a relatively easy and robust way of finding the peaks of the sinusoid is via numerical differentiation, i.e. computing the difference between sample values and then looking for the zero-crossing points in the differentiated data. Armed with the positions and amplitudes of the peaks, we can take the average and easily obtain the amplitude and frequency. Notice that any DC offsets and low-frequency baseline wander will be removed via the differentiation operation.
This is just a simple example of how to extract the properties of a sinusoid in real-time using science and mathematics and an understanding of the underlying process without the need for ML training data.
Arm’s Synchronous Data Stream (SDS) Framework provides developers with an easy method of capturing and playing back real-time sensor data for embedded AIoT sensor applications on Arm Cortex-M processors. A set of Python utility scripts are available for recording, playback, visualisation and data conversion, where the latter supports the conversion of captured SDS data files into a single CSV file – providing a simple bridge between the ASN Filter Designer and the SDS Framework.
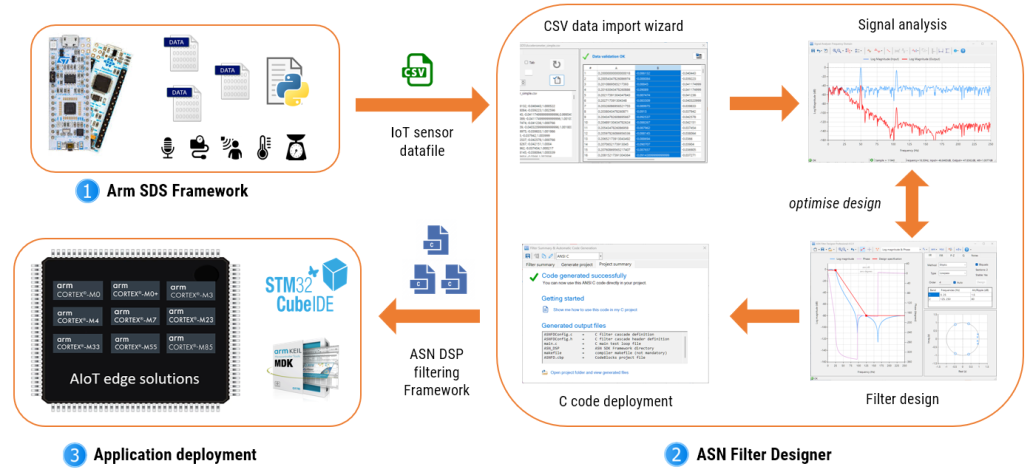
An AIoT smart sensor design workflow using the ASN Filter Designer and the SDS Framework is shown below.
As seen above, three major components constitute the AIoT design workflow.
Arm SDS Framework: capturing IoT sensor data and converting it to CSV format.
ASN Filter Designer: importing the CSV datafile and then analysing the data. Based on the data analysis, a suitable filter can be designed together with other filters and IP blocks in order to build feature extraction algorithms for ML applications.
Application deployment: Generating optimised C code and combining the design with an application for use on an Arm microcontroller.
The SDS Framework can be used with all major demo boards, including ST’s Discovery kit and Nucleo boards. SDS Python utilities are used to convert the captured *.sds and *.yaml files into a CSV file for import into the ASN Filter Designer, as discussed in the following section.
Data Import Wizard
The ASN Filter Designer’s comprehensive data import wizard can delimitate and import a variety of multi-column IoT datasets in CSV or TXT form.
As seen in the video, a generated CSV file can be dragged and dropped onto the signal analyser canvas, bringing up the data import wizard. The import wizard will automatically check the imported data for errors (such as NaNs, Infs etc) and then order the data into columns. Any header line data can be skipped by setting the Skip Headerlines value respectively.
For the example considered herein, the data is actually triaxial accelerometer data (i.e. X, Y and Z axes) with an extra column for the timebase. Therefore, if we wish to import the X-axis data, we can simply click on the header for the second column (B). The tool will then ask you to recheck the data, and upon clicking on ‘Save’ will save the selected data as a single-column CSV file (needed for the ASN Filter Designer). This new CSV file can then be streamed via the tool’s signal generator for algorithm development.
Deploying to Arm Cortex-M processors
After completing the design process, the designed filter(s) can be deployed to STM32CubeIDE or Arm/Keil uVision for integration into an application project. Depending on the functionality of the ASN Filter Designer’s signal chain, two software frameworks are available: Arm’s CMSIS-DSP and ASN’s ANSI C DSP.
The ANSI C DSP framework was developed with close collaboration with Arm’s architecture team, providing outstanding computational performance that is required for real or complex coefficient floating-point designs that use multiple filters and mathematical functions in a signal chain. The Arm CMSIS-DSP framework on the other hand is an excellent choice for implementing both fixed-point and floating-point filters, but is limited to real coefficient single FIR filter or one IIR Biquad cascade with no extra mathematical functions.
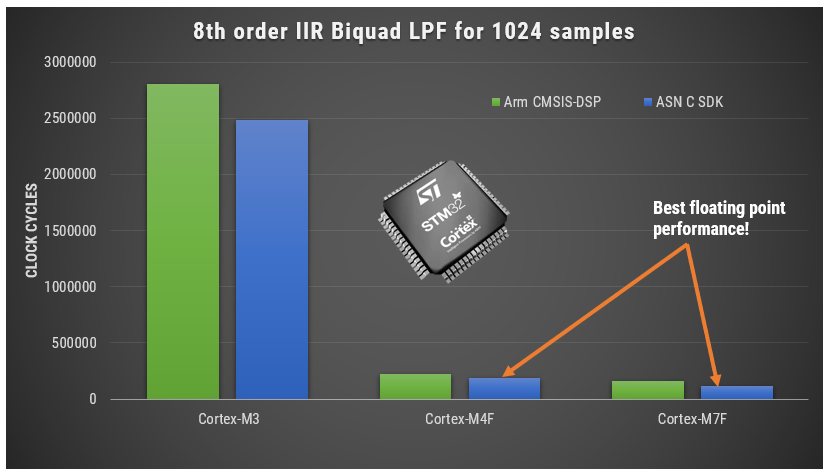
A benchmark comparison for both frameworks is shown below for an 8th IIR filter running on three different Arm cores. As seen, the ASN Framework is slightly faster (lower means better performance) than the Arm Framework.
Framework Benchmarks: lower number of clock cycles means higher performance.
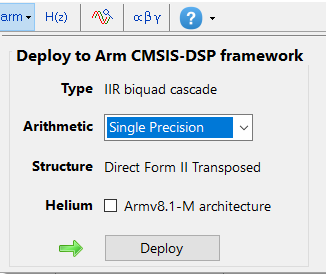
Arm CMSIS-DSP wizard
Professional licence users may expedite the deployment by using the Arm deployment wizard. The tool will automatically analyse your design and choose a suitable Framework. If the design cannot be exported via the Arm CMSIS-DSP framework, the tool will suggest that you use the ASN ANSI C framework and launch the code generation wizard.
Note that the built-in AI will automatically determine the best settings for your design based on the quantisation settings chosen.
Clicking on Deploy will automatically analyse your complete filter cascade and convert any extra filters in the cascade into an H1 (primary) for implementation. Upon completion, the tool will then launch the C code generation wizard.
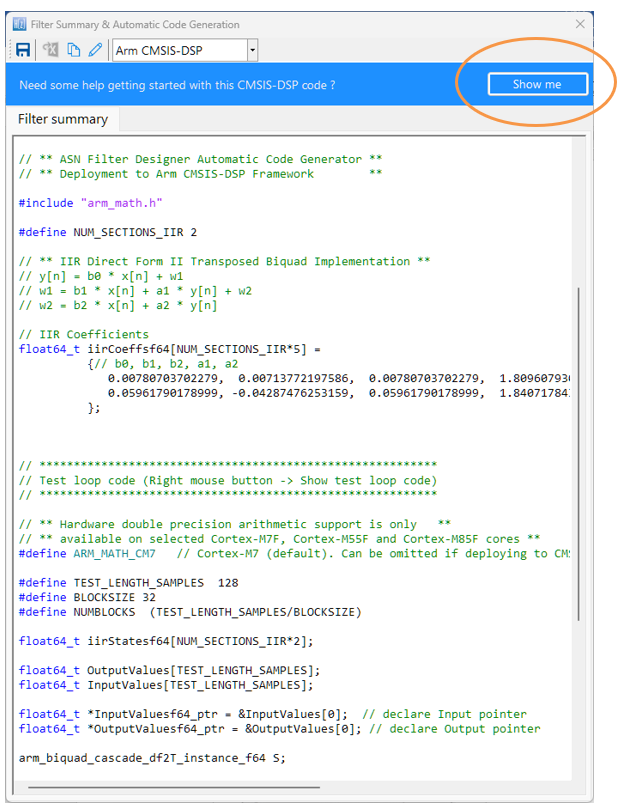
CMSIS-DSP C code generation
Depending on which C framework is used, the C code generator wizard will automatically generate the C code needed for your design. For developers using the Arm CMSIS-DSP framework, a single C file is generated for use with an MDK5 software pack. The MDK5 pack is available from Arm Keil’s software pack repository, providing several complete filtering examples based on the ASN Filter Designer’s code generator using the Arm CMSIS-DSP library.
A detailed help tutorial is available by clicking on the Show me button.
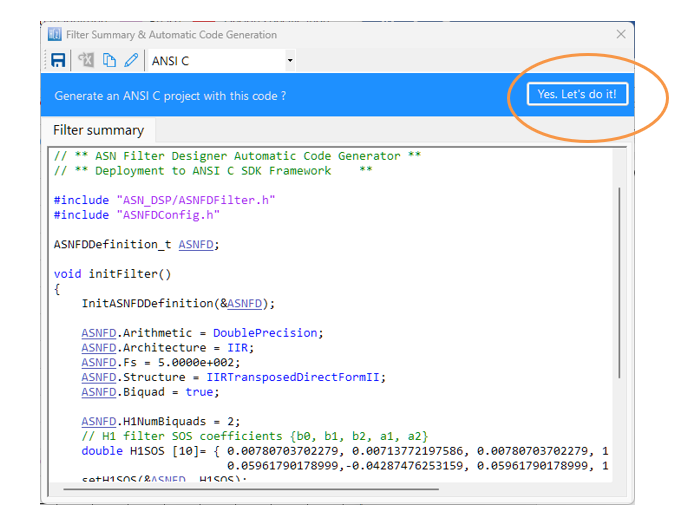
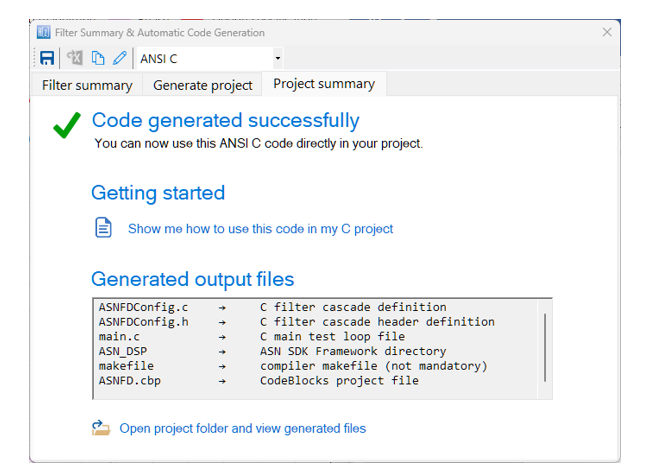
ASN ANSI C DSP code generation
For developers using the ASN ANSI C DSP framework, the code wizard should be used.
NB. The wizard will produce a CodeBlocks project in order to get you started. The following section describes in detail the steps needed for using the generated code in a STM32CUBE-IDE project. Please refer to the ANSI C SDK user guide for step-by-step instructions on how to use the generated code in other IDEs.
A PDF version of this article is available as an application note.
Sanjeev is a RTEI (Real-Time Edge Intelligence) visionary and expert in signals and systems with a track record of successfully developing over 26 commercial products. He is a Distinguished Arm Ambassador and advises top international blue chip companies on their AIoT/RTEI solutions and strategies for I5.0, telemedicine, smart healthcare, smart grids and smart buildings.
https://www.advsolned.com/wp-content/uploads/2023/07/sds_asnfd.png6431393Dr. Sanjeev Sarpalhttps://www.advsolned.com/wp-content/uploads/2021/07/asn_logo_red_met_tekst_helder-e1755353934770.pngDr. Sanjeev Sarpal2023-07-31 11:55:472024-02-16 12:33:52Design of AIoT algorithms with the ASN Filter Designer and the Arm SDS Framework and their deployment to STM32 microcontrollers
Advances in telemedicine healthcare products over the past decades have been truly miraculous with ingenious little devices invented by start-ups as well as by larger corporations, .e.g Apple’s smart watch and the Fitbit. These advancements have been facilitated by the availability of low-cost microcontrollers offering algorithmic functionality, allowing developers to implement wearables with excellent battery life and edge based real-time data analysis.
Over 90% of the microcontrollers used in the smart product market are powered by so called Arm Cortex-M processors that offer a combination of high algorithmic performance, low-power and security. The Arm Cortex-M4 is a very popular choice with hundreds of silicon vendors (including ST, TI, NXP, ADI, Nordic, Microchip, Renesas), as it offers DSP (digital signal processing) functionality traditionally found in more expensive devices and is low-power. Arm and its rich eco system of partners provide developers with easy-to-use tooling and tried and tested software libraries, such as the CMSIS-DSP and CMSIS-NN frameworks for algorithm development and machine learning.
The choice is vast, and can be very confusing. Therefore, here are some practical hints and tips for both managers and developers to help you decide which Arm Cortex-M processor is best for your biomedical product.
Which Arm Cortex-M processor do I choose for my biomedical application?
The Arm Cortex-M0+ processor is an ultra-low power 32-bit processor designed for very low-cost IoT applications, such as simple wearable devices. The low price point is comparable with equivalent 8-bit devices, but with 32-bit performance. Microcontrollers built around the M0+ processor provide developers with excellent battery life (months to years), a rich peripheral set and a basic amount of connectivity and computational performance. The latter means that only simple algorithms can be implemented, such as algorithms for correcting baseline wander and minimizing the effects of motion artefacts using accelerometer data via an adaptive filter, such as the NLMS algorithm. Although for PPG pulse rate measurement applications, the sampling rate is typically 50Hz, leaving the processor plenty of time to perform various simpler algorithmic operations, such as digital filtering and zero-crossing detection.
For high performance PPG applications, sampling rates in the order of 500Hz are typically used. These types of applications usually look at more biomedical features, such as identifying the Systolic and Diastolic phases and finding the Dicrotic notch using feature extraction algorithms and ML models. These extra functionalities provide a significant strain on the processor’s abilities, and as such are beyond the abilities of the M0+.
The Cortex-M3 is a step up from the M0+, offering better computational performance but with less power efficiency. The extra processing power, rich hardware peripheral set for connecting other sensors and connectivity options makes the M3 a very good choice for developers looking to develop slightly more advanced wearable products, such as the Fitbit device that is based on ST’s low-power STM32L series of microcontrollers.
High performance wearables and beyond
The Arm Cortex-M4 processor and its more powerful bigger brother the Cortex-M7 are highly-efficient embedded processors designed for IoT applications that require decent real-time signal processing performance and memory. Depending on the flavour of the processor, the M4F/M7F processors implement DSP hardware accelerated instructions, as well hardware floating point support. This lends itself to the efficient implementation of much more computationally intensive biomedical DSP and ML algorithms needed for more advanced telemedicine products.
The hardware floating point support unit expedites RAD (rapid application development), as algorithms and functions developed in Matlab or Python can be ported to C for implementation without the need for a lengthy data arithmetic quantisation analysis. Microcontrollers based on the M4F or M7F, usually offer many of the hardware peripheral and connectivity advantages of the M3, providing developers with a very powerful, low power development platform for their telemedicine application.
The Arm Cortex-M33 is a step up from the M4 focusing on algorithms and hardware security via Arm’s TrustZone technology and memory-protection units. The Cortex-M33 processor attempts to achieve an optimal blend between real-time algorithmic performance, energy efficiency and system security.
State-of-the art AI microcontrollers
Released in 2020, the Arm Cortex-M55 processor and its bigger brother the Cortex-M85 are targeted for AI applications on microcontrollers. These processors feature Arm’s Helium vector processing technology, bringing energy-efficient digital signal processing (DSP) and machine learning (ML) capabilities to the Cortex-M family. In November 2023, Arm announced the release of Cortex-M52 processor for IoT applications. This processor looks to replace the older M33 processor, as it combines Helium technology with Arm TrustZone technology.
Although the IP for these processors is available for licencing, only a few IC vendors have developed a microcontroller, e.g. Samsung’s Exynos W920 SoC that has been specifically designed for the wearables market. The SoC packs two Arm Cortex-A55 processors, and the Arm Mali-G68 GPU using state-of-the art 5nm semiconductor technology. The chipset also features a dedicated low-power Cortex-M55 display processor for handling AoD (Always-on Display) tasks – although a little over the top for simple wearable devices, the Exynos processor family certainly seems like an excellent choice for building next generation AI capable low-power wearable products.
So, which one do I choose?
The compromise for biomedical product developers when choosing an M4, M7 or M33 based microcontroller over an M3 device usually comes down to a trade-off between algorithmic performance, security requirements and battery life. If good battery life and simple algorithms are key, then M3 devices are a good choice. However, if more computationally intensive analysis algorithms are required (such as ML models), then the M4 or M7 should be used.
As mentioned earlier, the Armv7E-M architecture used in M4/M7 processors supports a DSP extension that implements an SIMD (single instruction, multiple data) architecture extension that can significantly improve the performance of an algorithm. The hardware floating point unit is very good for expediting MAC (multiply and accumulate) operations used in digital filtering, requiring just three cycles to complete. Other DSP operations such as add, subtract, multiply and divide require just one cycle to complete.
The M7 out performs its M4 little brother by offering approximately twice the computational performance and some devices even offer hardware double precision floating point support which make M4/M7 processors attractive for high accuracy algorithms needed for medical analysis.
If data security is paramount, for example protecting and securing transferring patient data to a cloud service, then the M33 or the M52 (when avalaible) are good choices. These devices also offer a high level of protection against tampering and running of authorised code via TrustZone’s trusted execution environment.
Some IC vendors now offer hybrid micro-controllers that implement multi-processors on chip, such as ST’s ST32Wx family that combine the M0+ and M4 in order to get the advantages of each processor and maximise battery life.
Finally, advances in semiconductor technology means that a modern M4F processor produced with 40nm process technology may match or even surpass the energy efficiency of an M3 produced with 90nm technology from several years ago. As such, higher performance processors that were until several years too costly and energy inefficient for low-cost wearables products are rapidly becoming a viable solution to this exciting marketplace.
Sanjeev is a RTEI (Real-Time Edge Intelligence) visionary and expert in signals and systems with a track record of successfully developing over 26 commercial products. He is a Distinguished Arm Ambassador and advises top international blue chip companies on their AIoT/RTEI solutions and strategies for I5.0, telemedicine, smart healthcare, smart grids and smart buildings.
https://www.advsolned.com/wp-content/uploads/2023/04/armcores_biomedical-1.png540865Dr. Sanjeev Sarpalhttps://www.advsolned.com/wp-content/uploads/2021/07/asn_logo_red_met_tekst_helder-e1755353934770.pngDr. Sanjeev Sarpal2023-04-19 10:48:562024-05-25 22:53:36Choosing the right Arm Cortex-M processor for your biomedical smart product: a practical guide
In a previous blog, we talked about how IoT can help in taking control. There is another step further: to optimize your processes with AIOT.
Benefits
Better use of existing resources
Take the right decisions at the right time
Optimal circumstances
Better use of existing resources
Control means you have a clear overview how assets are being used. Such as:
How long does each step in a process take?
What are the whereabouts of my assets (trucks, cranes, forklifts, containers…)?
What is the state of maintenance?
The next step is of course, to optimize your business.
First of all, many blogs write about total-new situations. In fact, most AIOT is needed in companies which are already established. With their inventory, processes, customers and all the responsibilities which come with them. Large investments have been made to reach the business today. And so, their processes may not be optimal, at least they work. So how to benefit from AIOT, without throwing away all these investments? And: how to be sure processes are at least working as they do know? Smart sensors help to bring the whole process at today’s level, without throwing away resources which are working fine. Besides, companies can choose to implement AIOT piecemeal.
This is especially the case when it’s about highly essential functions such as infrastructure, sluices and installations. Here, the asset is not just an asset, but a part of a total infrastructure. Downtime of such an asset has large implications for society as a whole.
Many processes are still monitored piecemeal. A further optimization is to connect systems with each other. Get 1 overview in 1 dashboard. Learn how your processes are doing, and where are the optimizations are required.
Take the right decisions at the right time
To measure is to know, to know is to be able to improve.
One most mentioned benefits of AIOT is preventive maintenance. Preventive maintenance means that something is repaired or replace, before it is breaks. Or at least, to maintain while the damage is still small. In normal situations there would be downtime, now repairs can be made scheduled. And if downtime is needed for repairs, then it can be scheduled at times the least inconvenient.
It’s already been said: to be able to schedule repairs. Take the right decisions at the right time. Besides, in the old situation, a foreman has to do his round, where he gives each machine the same attention. With AIOT, the quality of the assets can be guarded with sensors. So, at his round, a foreman can give most attention to the machines which mostly need it.
The same applies to a sector as biomedical: ‘to prevent is better then to cure’. So, help your clients and/or yourself to stay healthy. An example is fall detection. And does the elderly take his medicine?
Help your patients with therapy, to make use of knowledge from all previous patients: is therapy going on track? Also: give the patients who need it the right amount of attention. Instead of seeing all your patients with a standard scheduled time-frame, and as a consequence, give none of them enough time really. If therapy is lagging, you probably want to give those patient attentions. Is therapy going faster then expected: what are the reasons? How can this knowledge be used to improve therapy in the future? Besides, if people can do therapy and appointments at home, they don’t have to spend their precious time; where the actual time needed for treatment is shorter then the time spent on travelling and waiting.
Optimal circumstances
Sensors can guard that product are made or kept in optimal circumstances. E.g., if cutting parts of a machine are still sharp enough, and in their right precision. Or guard the temperature of cooling or keep an eye on the indoor air quality. This may also make guarantees possible, and thus creating added value to your products or service.
https://www.advsolned.com/wp-content/uploads/2021/07/sensors-biomedicial-devices-optimize-ai-iot-aiot.jpg495495ASN consultancy teamhttps://www.advsolned.com/wp-content/uploads/2021/07/asn_logo_red_met_tekst_helder-e1755353934770.pngASN consultancy team2021-10-29 09:27:162021-10-29 09:27:19What do you want to achieve with AIOT?: To Optimize
Since the end of July 2020, KPN has renewed its mobile network which enables 5G. KPN is rapidly expanding coverage throughout the Netherlands. Business customers and entrepreneurs can already make use of special 5G services. To see tomorrow’s digital highway in action, since 5G is one of the enablers for smart industry
Starting in 2022, KPN will auction G5 frequencies. Meanwhile, together with customers and technology partners, telecom and ICT service provider KPN has launched 5G field labs to discover the value of 5G applications. Thanks in part to 5G technology, these types of applications will become a reality.
During the new 5G auction, frequencies in the 3.5 GHz band will be distributed. These will enable connections at much higher speeds. At the auction in the first quarter of 2022, at least three parties must obtain licenses for the frequencies. No single party may acquire more than 40 percent of the available frequencies, says the proposal for the course of the auction.
A total of 300 megahertz of bandwidth is to be distributed. This consists of three blocks of 60 megahertz and twelve blocks of 10 megahertz. The auction will be held in three phases. Prior to and during the auction the Ministry of Economic Affairs will not provide information about the total number of participants. At the end, the winning parties will be announced and the State Secretary will make the entire bidding process public.
Thanks to the capacity and reliability of our network, new applications such as innovations in security, healthcare, mobility, logistics and the manufacturing industry become possible. Unlike 4G, 5G is expected to become an ecosystem from which many business sectors, industries and areas can benefit. Innovations from which the whole of society benefits. In addition to higher speed, 5G focuses explicitly on flexibility in the network to support very short response times and higher reliability. This will enable a wide range of new applications for customers and industries.
5G is expected to provide a huge boost in business for augmented and virtual reality, robotics, drones, intelligent assets, wearables, AI-based video analytics and Internet of Things (IoT), among others.
In addition to 5G, Internet of Things also requires edge computing. This involves placing a small cloud with computing power, storage and network capacity at the edge of the network, as it were, close to applications, devices and users. Because data no longer has to travel all the way up and down to the cloud or a data center, time-critical applications such as self-driving cars and augmented reality become possible.
5G is also a key enabler for Industry 4.0. This involves using Internet of Things, cloud computing and data integration, among other things, to make the production process fully computer-controlled and remote. The human thought process is thereby partially or completely taken over. Due to its high speed and reliability and short latency, 5G is essential within Industry 4.0 for, for example, controlling production lines, facilitating self-driving vehicles and connecting large numbers of IoT devices.
The national rollout of 5G has only just started, but KPN has been testing 5G for useful applications in its Field Labs for some time.
The 5G field lab for the manufacturing industry shows everyone which 5G indoor use cases are possible in a factory environment. Besides speed, 5G also enables larger reliability and very low network latency. A large number of wireless sensors also plays an important role in the further rollout of the IoT. Thus, the 5G Field Labs shows that 5G can be used for very different applications simultaneously.
https://www.advsolned.com/wp-content/uploads/2019/08/5g.jpg594810ASN consultancy teamhttps://www.advsolned.com/wp-content/uploads/2021/07/asn_logo_red_met_tekst_helder-e1755353934770.pngASN consultancy team2021-10-25 17:43:232021-10-25 17:43:25The roll-out to 5G: enabler for Industry 4.0
AIoT has many benefits. Those benefits can be summarized as: saving, controlling, optimizing and innovation. How does AIOT reduce costs and provide more efficiency?
How AIoT can help to save:
Preventive maintenance
Efficient use of time, equipment and money
Lesser costs of energy
Don´t throw away infrastructure which is working fine
Preventive maintenance
Purchasing new machinery involves high costs. The assets of public infrastructure exist of expensive equipment. So, there are high costs of replacing equipment which is failing. To reduce these costs, Preventive maintenance comes in. With Preventive maintenance, you can repair or replace parts from which you know that they will not be working properly in a short time. Or on the moment they are not working properly anymore. With this maintenance program, you can act because an (expected) little failure has caused damage.
And, in many cases such as public infrastructure, a not working device isn’t just a not working device! A failure of a sluice or railroad switch causes disruption for the infrastructure as a whole: Ships and trains can’t deliver their goods anymore on time. Customers are standing literary in the cold due to not working train infrastructure. With preventive maintenance you can spare them (or yourself) high costs and much annoyance.
Efficient use of time, equipment and money
Use your time, equipment or money? As efficient as possible. In a time of growing economies, employees are scarce and hard to find. So you want to make use of your employee’s time as efficient and effective as possible. This means that employees have to to be able give attention to things… really needed. IoT makes this possible. Some examples:
For offices: cleaners have to clean only the places of the office which have actually used instead of cleaning the whole building. Non-used offices can even be shut down.
Logistics: more efficienct planning of cranes, further transport
Already mentioned: the benefit of preventive maintenance
Lesser costs of energy
Another savings IoT makes possible is saving of energy.
And of course, this benefits the user but also the planet as a whole! And that makes your customers and employees even more satisfied. Which makes that they will stay customer or employer longer… Besides, if you rent offices, they will be longer and easier hired.
Don’t throw infrastructure which is working fine
In most buildings and logistics, the infrastructure has been built years ago with huge efforts and costs. The infrastructure is mission critical, so owners often still accept that their infrastructure isn’t the most efficient, as long as it works. Now sensors come in: they bring an extra layer upon the already existing devices, be it such different devices as hvac in office buildings or cranes in ports.
https://www.advsolned.com/wp-content/uploads/2021/06/smart-city-icons.jpg6931039ASN consultancy teamhttps://www.advsolned.com/wp-content/uploads/2021/07/asn_logo_red_met_tekst_helder-e1755353934770.pngASN consultancy team2021-06-30 10:15:002021-06-30 13:17:55The Benefits of AIOT: “Lower Costs or More Efficiency”
What are Finite Impulse Respsonse (FIR) Filters? And how to design FIR Filters in ASN Filter Designer and which filters does ASN Filter Designer support?
https://www.advsolned.com/wp-content/uploads/2018/07/Direct-Form.png11151050ASN consultancy teamhttps://www.advsolned.com/wp-content/uploads/2021/07/asn_logo_red_met_tekst_helder-e1755353934770.pngASN consultancy team2020-08-22 14:30:522021-03-12 16:19:02How to design FIR Filters in ASN Filter Designer
ASN Smart algorithms and technology offer the IoT approach and results you need.
Since 2006, ASN has successfully helped many international organisations. With data analysis, algorithms, security and successful implementations for their embedded IoT applications.
62 Tried & tested IP blocks that are used worldwide
Combability with Arm Cortex-M technology, used in over 80% of IoT devices
Biomedical ECG, EMG, Lab-on-chip and vital life signs algorithmic solutions
High precision gas and flow rate measurement solutions
Human/object radar based motion tracking
Sensor signal processing
62 application IP Blocks
Our tried and tested application IP blocks are tried and tested worldwide for variety of IIoT/IoT applications, including:
Biomedical (EMG, ECG, vital life signs, lab-on-chip)
Smart Grids
Machine and motor maintenance
Oil and gas
ADAS (automotive driver assistance)
Smart street lighting
Noise cancellation
Industrial sensors
Compatibility with Arm Cortex-M technology
The ASN Filter Designer has an automatic code generator for Arm Cortex-M cores. This means that we support virtually every Arm based demo-board: ST, Cypress, NXP, Analog Devices, TI, Microchip/Atmel. And over 200+ other manufacturers. Our compatibility with Arm’s industry standard CMSIS-DSP software framework removes the frustration of implementing complicated digital filters in your IoT application. As a result, you get code that is optimal for Cortex-M devices and that works 100% of the time.
From algorithmic concept to NPD
Our NPD (product development process) provides a systematic and efficient way of productising a developed IoT algorithmic concept. This allows you to get your IoT application to market based on first time right principles.
Biomedical ECG, EMG, Lab-on-chip and vital life signs
One of our specialised sectors is the one of biomedical. For this sector, our ASN Filter Designer is very suitable for data filtering of ECG and EMG. After data filtering, you can export your cleaned data to Matlab. Or immediately export it to an Arm microcontroller for deployment. In parallel to the ASN Filter Designer, we have developed algorithms for a Lab-on-chip and Vital Life Signs measurement.
High precision gas and flow rate measurement solutions
One of our other specalisms are high precision gas and flow rate measurement solutions. Our comprehensive collection of application IP blocks has allowed many international companies to obtain outstanding measurement performance for their IoT applications!
https://www.advsolned.com/wp-content/uploads/2018/04/0.jpg387640ASN consultancy teamhttps://www.advsolned.com/wp-content/uploads/2021/07/asn_logo_red_met_tekst_helder-e1755353934770.pngASN consultancy team2020-08-03 12:48:232020-08-14 17:57:48Get the best results out of your IoT infrastructure: design, maintenance and innovation
https://www.advsolned.com/wp-content/uploads/2019/11/Worker-pipelines.jpg9981500ASN consultancy teamhttps://www.advsolned.com/wp-content/uploads/2021/07/asn_logo_red_met_tekst_helder-e1755353934770.pngASN consultancy team2020-07-27 13:06:402020-08-25 16:42:46How DSP for oil, gas and flow measurement can benefit from the ASN Filter Designer
While the developments in the use of drones are going very fast, most of its use is still in an experimenting phase. Besides, the technique is working on an individual basis. From start-ups to big companies like Google, Amazon and UPS. Companies are experimenting by delivering pizzas on the beach. In the future, when drones have become widely adapted, a new form of air control must be developed. In crowded areas in particular. When drones might take up from anyplace and land anywhere anytime, air control is far more difficult than control of normal airplanes. And of course, delivery drones are supposed to work without human interference, even beyond sight from the owner of these drones.
Communication
Drones need to communicate with each other, and with other participants of air traffic. Furthermore, questions about prevention from flying over fires and forbidden areas must be solved. For instance airports, strategic points as driveways and military zones. Taking in consideration they might fly of its course due to wind.
Congestion
When pizza delivery will be just as common as delivery by scooter nowadays, a form of air congestion is going to take place as well. Companies are already proposing to use different ‘airlines’ for speedy delivery and slower registering traffic. But then, there must come a solution how to handle the event when delivery drones are in each other environment without colliding. Or to prevent that the whole traffic gets stuck because every device is waiting on other drones.
The ‘congestion’ takes also place in the use of frequencies. Drones use the same frequencies as a lot of other uses. For instance, airlines and military.
Standardization and legislation
That means standardization and legislation is needed. Standardization, to make certain that drones from different users/companies can communicate with each other. And to make decisions to fly safely and as efficiently as possible. Like other kinds of traffic, legislation is needed to set some rules how all devices can participate in drone traffic and traffic in general. And, when industry won’t be able to solve the already issues mentioned on trust and acceptability, legislation might also come in to set restrictions in the use of drones.
Final Thoughts
The application possibilities of drones are very promising for delivery and registration uses. It is still in its experimental phase. But with developments going fast, soon it will reach the maturity phase. For this, there are two-fold kind of challenges.
One of these are challenges on privacy, safety and security. These challenges have to be solved before their use will get widespread trust and acceptance. Besides, there are technical and communication issues: where multiple drones are being used – especially in cities- challenges how drones can and have to behave in traffic has to be solved.
In both challenges, sensors play a pivotal role in solving the technical questions. Find out more about Drones and DC motor Control
https://www.advsolned.com/wp-content/uploads/2018/09/drone-delivery-shop.jpg5801500ASN consultancy teamhttps://www.advsolned.com/wp-content/uploads/2021/07/asn_logo_red_met_tekst_helder-e1755353934770.pngASN consultancy team2020-07-27 11:53:182020-09-05 11:32:44How drones fuel 'smart air': air control and congestion