For public infrastructure, removing graffiti costs millions of euro each year. Besides the direct costs, there are the costs of not using the equipment and environmental costs. And naturally, the trains, buses, metro, etc. are your visit card to customers.
The thrill of success
Sometimes, graffiti can look beautiful. But mostly, it looks -and is- vandalism.
Non-removal is an invitation to even more graffiti. Tests in New York have turned out that the immediate removal of graffiti, at least the same day, discourages further graffiti. Besides, the subway of New York is guarded closely, so it has become difficult for vandals to create their painting.
To create something beautiful is mostly not the aim of the sprayers. Most painters do it for the ‘thrill’. The first thrill is to finish their work before they are noticed. The other is to see their work travelling the next day, knowing it will travel the whole country. There are solo-sprayers. But mostly, sprayers work in groups. Actions are being planned, to out-smarten the (railway) police.
Nowadays, public transport companies have guidelines when graffiti is noticed: an employer (e.g. the train manager notices the painting, signs a cleaning company and this company cleans the graffiti the same day with a mobile team.
But as the saying goes: prevention is better than curing! How can you diminish the change of graffiti paintings? Track & Trace solutions help.
Know if someone enters your shunting yard unwanted
The shunting yard is a known spot for graffiti painters. At night, or just on the day itself because it’s easy to enter the premises.
Most marshal yards are guarded by security. However, because they are quiet places, it is rather easy to enter the site and hide from security. Besides, most graffiti painters operate in groups. So, they are practiced to paint a wagon in no-time.
The Dutch regional TV broadcast OogTV: “Meanwhile I know, also from stories that I hear from colleagues from the country, that such artists are unstoppable. We can make the gates so high, and the locks so wide, but if these people want to, they will succeed.”
How Tracy can help: perimeter and object guard
Track and trace can help preventing graffiti in 2 ways:
Perimeter detection
Object guard
Know if someone enters the marshal yard or any other perimeter. Act immediately on ‘strange’ behavior, such as: unidentified persons on the premises. Or persons at times when you expect nobody will be there. Another option is to guard the object itself, such as a train wagon itself with a sensor. An alert is being send when persons approach the object.
So, you can prevent graffiti to take place or at least, to prevent the painter from finishing his ‘artwork’.
https://www.advsolned.com/wp-content/uploads/2020/07/trains-grafitti-track-trace.jpg6741500ASN consultancy teamhttps://www.advsolned.com/wp-content/uploads/2021/07/asn_logo_red_met_tekst_helder-e1755353934770.pngASN consultancy team2020-07-21 13:13:572021-10-06 11:23:40Are you a logistics provider or art supporter? How Track and Trace helps you to defeat graffiti
DSP for engineers: the ASN Filter Designer is the ideal tool to analyze and filter the sensor data quickly. Create an algorithm within hours instead of days. When you are working with sensor data, you probably recognize these challenges:
My sensor data signals are too weak to even make an analysis. So, strengthening of the signals is needed
Where I would expect a flat line, the data looks like a mess because of interference and other containments. I need to clean the data first before analysis
Until now, you’ve probably spent days or even weeks working on your signal analysis and filtering? The development trajectory is generally slow and very painful.
In fact, just think about the number of hours that you could have saved if you had design tool that managed all of the algorithmic details for you. ASN Filter Designer is an industry standard solution used by thousands of professional developers worldwide working on IoT projects.
Our close collaboration with Arm and ST ensures that all designed filters are 100% compatible with all Arm Cortex-M processors, such as ST’s popular STM32 family.
Challenges for engineers
90% of IoT smart sensors are based on Arm Cortex-M processor technology
Sensor signal processing is difficult
Sensors have trouble with all kinds of interference and undesirable components
How do I design a filter that meets my requirements?
How can I verify my designed filter on test data?
Clean sensor data is required for better product performance
Time consuming process to implement a filter on an embedded processor
Time is money!
Designers hit a ‘brick wall’ with traditional tooling. Standard tooling requires an iterative, trial and error approach or expert knowledge. Using this approach, a considerable amount of valuable engineering time is wasted. ASN Filter Designer helps you with an interactive method of design, whereby the tool automatically enters the technical specifications based on the graphical user requirements.
Fast DSP algorithm development
Fully validated filter design: suitable for deployment in DSP, micro-controller, FPGA, ASIC or PC application.
Automatic detailed design documentation: expediting peer review and lowing project risks by helping the designer create a paper trail.
Simple handover: project file, documentation and test results provide a painless route for handover to colleagues or other teams.
Easily accommodate other scenarios in the future: Design may be simply modified in the future to accommodate other requirements and scenarios, such as 60Hz powerline interference cancellation, instead of the European 50Hz.
ASN Filter Designer: the fast and intuitive filter designer
The ASN Filter Designer is the ideal tool to analyze and filter the sensor data quickly. When needed, you can easily deploy your data for further analyze for tools such as Matlab and Python. As such it’s ideal for engineers who need and powerful signal analyser and need to create a data filter for their IoT application. Certainly, when you have to create data filtering once in a while. Compared to other tools, you can create an algorithm within hours instead of days.
Easily deploy your algorithms to Matlab, Python, C++ and Arm
A big timesaver of the ASN Filter Designer is that you can easily deploy your algorithms to Matlab, Python, C++ or directly on an Arm microcontroller with the automatic code generators.
Instant pain relief
Just think about the number of hours that you could have saved if you had design tool that managed all of the algorithmic details for you.
ASN Filter Designer is an industry standard solution used by thousands of professional developers worldwide working on IoT projects. Our close collaboration with Arm and ST ensures that the all filters are 100% compatible with all Arm Cortex-M processors.
How much pain relief can 125 Euro buy you?
Because a lot of engineers need our ASN Filter Designer for a short time, a 125 Euro license for just 3 months is possible!
Just ask yourself: is 125 Euro a fair price to pay for instant pain relief and results? We think so. Besides, we have a license for 1 year and even a perpetual license. Download the demo to see for yourself or contact us for more information.
Preventive Maintenance is one of the golden nuggets of IOT. How does this focus affect the deployment of personnel?
Efficiencty of personnel: more and better results
Challenge of scarcity of personnel
The challenges of the aging engineer
Efficiency of personnel: more and better results
There was and is a lot of attention what sensors can do for preventive maintenance: with preventive maintenance, huge costs of big repair costs are avoided by acting on time. One aspect in this way of thinking, was that existing personnel could work more efficiently. In old days, mechanics and engineers did their regular scheduled rounds of maintenance, where every device got similar time of attention, whether the device was in a bad state or not. Sensors measure the state of maintenance of devices real-time. As such, personnel can give attention to devices which really needs it. By using your existing personnel in this more efficient way, high personnel costs are saved because no other personnel would have been hired.
Challenge of Scarcity of personnel
When Preventive Maintenance became popular some years ago as one of the fields of Internet of Things, the world was still in the last phase of the economic crisis. Industry has in some ways still crisis thought: yes, personnel is hard to find. But they don’t make the connection that efficiency has changed in the guise of ‘cost saver’ to ‘benefit most from opportunities’. Because personnel is so hard to find, industry has to use the available personnel as efficient and effectively as possible. Besides, engineering for infrastructure isn’t a popular study any longer. So, engineers are even harder to find.
With preventive maintenance with the aid of sensors, personnel can give attention to the devices which really needs them.
The challenges of the aging engineer
There is more: most infrastructure has been built 20 years ago. Already, there’s the challenge that those engineers have moved on to other jobs. So, it’s very possible indeed that in a company, nobody knows how this infrastructure works exactly any longer. Last years, a new challenge has come up: those engineers are beginning to retire. That means that a pool of this specific knowledge is already decreasing and will even lessen more in the years to come. Therefore, it is very important to have measures for maintenance in place, before this knowledge has disappeared completely.
https://www.advsolned.com/wp-content/uploads/2020/06/old-and-young-engineer.jpg390495ASN consultancy teamhttps://www.advsolned.com/wp-content/uploads/2021/07/asn_logo_red_met_tekst_helder-e1755353934770.pngASN consultancy team2020-06-23 11:23:562020-08-13 09:33:00Preventive Maintenance and the challenges of qualified Personnel
A longer lifetime for your equipment with Preventive maintenance
Create the future. Better serve your client, with solutions which weren’t possible until now!
More satisfied customers
More control on your processes
Better Security
One of the most important areas for IoT is Preventive Maintenance. With the modern solutions, you can measure if assets are working properly. And if not, you can repair or replace them, even before those assets have created damage. Examples are:
Are the industrial motors running properly?
Is the oil pressure and quality still ok?
Are there any glitches in the electrical wiring?
How can I save on energy?
With IoT, you can give your equipment a longer lifetime and thus save on repair and replacement costs. Besides, you can spare on costs because you have grip on your processes. For instance: more efficiency on energy costs, better results through optimal deployment of employees
Your customers will become more satisfied with your services. With solutions which weren’t possible until now, products can ‘think’ for their users. In IOT, users raise the expectations and will be dissatisfied with devices which do not help them.
A dashboard helps you to view in one glance which assets are working properly and which are probably in need of repair or replacement. Further, you learn when, where and how intensely your assets are being used, so you use your assets more efficiently.
In a world of connected devices, security is very important. Hackers will try to break in: to steal, to cause harm or to shut down your devices. Without security, hackers can make their entry from anywhere: from one of your devices, but also an unsecured device from one of your employee’s at home. So, in the world of IOT, security of these devices is key.
IoT solutions
IoT solutions prevent accidents from happening and reduce the response time for maintenance. As results, your costs of maintenance will be lower and equipment will have a longer lifetime through Preventive Maintenance.
Sensor measurement solutions look for deviations in normal use. So, you can act upon the first deviations and before the device isn’t working at all. Examples are:
Monitoring the health of an industrial motor
Monitoring oil quality in chain mechanisms
Smart metering for saving energy
Clean sensor data required for sensor fusion and accurate decision making
Sensor data (audio, pressure, temperature, weight, etc.) have to be measured. However, most sensor signals are disturbed by:
Powerline interference and glitches.
Environmental factors (including: dust and other contaminants).
ASN Consultancy is the modern way of working of algorithm design to separate the wanted sensor signals from the undesirable unwanted signals. So, you can analyze and take action on clean and accurate sensor data.
Dashboard
Our tailormade dashboard solutions provide you all the information you need at one glance. So, you act on devices which are not working properly anymore. You can see the use of each device and can even predict the use in time, based on your history data. With this information, you can gain more efficiency or you can improve the satisfaction of your customers.
Security
With a world where everything is connected, security is very important. Because of its importance, its size and the results of an eventual disruption, infrastructure is an important target for terrorist and (future) enemy governments.
Container thefts are increasingly common. “What should you do with such a thing?” headlines the newspaper article. Recently, the police found a number of containers that were once stolen. Tracy, the IOT track and trace device, can help you.
Why should someone want to steal a container?
So, why should someone want to steal a container? For an outsider, it might sound a bit strange. Customers see the container mostly as a kind of large, metal ‘box’ to dispose waste. For a container company, the hiring of the container means trust in your logistic solutions. But for a thief, a container means an easy to steal loot: it’s already packed and stands ready to pick-up!
Stealing is that simple: the scrap metal booty is already packed!
Stealing containers with scrap metal is especially popular. That does not have to mean that a container actually contains scrap metal or is completely full: the thief’s hope for loot is enough. Stealing a container is pretty simple: all the thief needs is a truck. He can put the container on the back with a cable or grab arm in no time. This theft means a major loss for companies: a container can easily cost 5 to 10 thousand euros, beside the eventual value of the cargo. And possibly the trust the customer has in you.
All that most companies do untill now is to share on social media camera images of their container or the truck that was stolen. Hoping to find the thief. Or at least to prevent a recurrence.
Tracy IoT helps: track and trace
• Perimeter detection
• Track and trace on container: Immediate theft signal
Perimeter detection
Tracy checks whether persons enter the site. When “strange” people enter the site, a signal is immediately triggered. Besides, Tracy monitors the movement of people and assets within the perimeter. Tracy uses Ultra Wide Band (UWB). One of the big advantages of UWB is its accuracy, so you know immediately where to look.
Track and trace on container: Immediate theft signal
When there are movements around a container, a signal goes off. If these are “strange”, for example at late times when nobody should be present, you can take immediate action. If the container is taken along anyway, it can be detected by the UWB signal.
Although the design of FIR filters with linear phase is an easy task. This is certainly not true for IIR filters that usually have a highly non-linear phase response, especially around the filter’s cut-off frequencies. This article discusses the characteristics needed for a digital filter to have linear phase, and how an IIR filter’s passband phase can be modified in order to achieve linear phase using all-pass equalisation filters.
Why do we need linear phase filters?
Digital filters with linear phase have the advantage of delaying all frequency components by the same amount, i.e. they preserve the input signal’s phase relationships. This preservation of phase means that the filtered signal retains the shape of the original input signal. This characteristic is essential for audio applications as the signal shape is paramount for maintaining high fidelity in the filtered audio. Yet another application area that requires this, is ECG biomedical waveform analysis, as any artefacts introduced by the filter may be misinterpreted as heart anomalies.
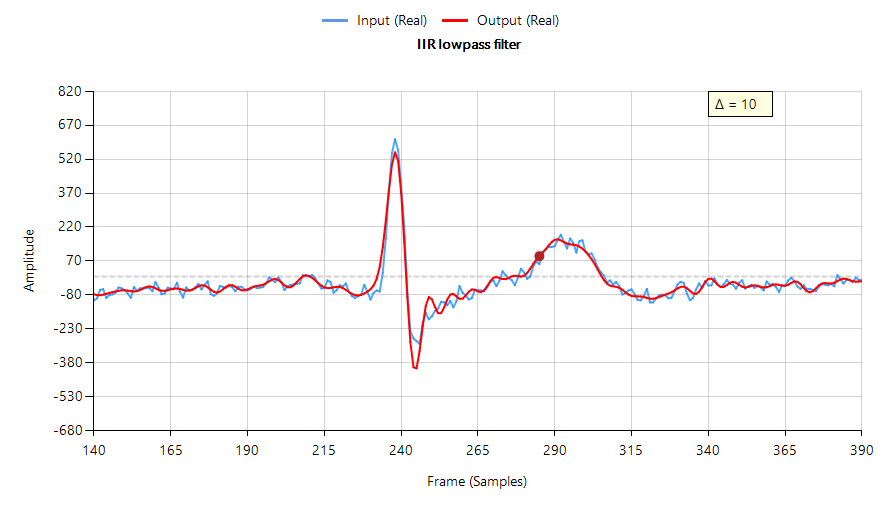
The following plot shows the filtering performance of a Chebyshev type I lowpass IIR on ECG data – input waveform (shown in blue) shifted by 10 samples (\(\small \Delta=10\)) to approximately compensate for the filter’s group delay. Notice that the filtered signal (shown in red) has attenuated, broadened and added oscillations around the ECG peak, which is undesirable.
Figure 1: IIR lowpass filtering result with phase distortion
In order for a digital filter to have linear phase, its impulse response must have conjugate-even or conjugate-odd symmetry about its midpoint. This is readily seen for an FIR filter,
Analysing Eqn. 3, we see that roots (zeros) of \(\small H(z)\) must also be the zeros of \(\small H^\ast (1/z^\ast)\). This means that the roots of \(\small H(z)\) must occur in conjugate reciprocal pairs, i.e. if \(\small z_k\) is a zero of \(\small H(z)\), then \(\small H^\ast (1/z^\ast)\) must also be a zero.
Why IIR filters do not have linear phase
A digital filter is said to be bounded input, bounded output stable, or BIBO stable, if every bounded input gives rise to a bounded output. All IIR filters have either poles or both poles and zeros, and must be BIBO stable, i.e.
Where, \(\small h(k)\) is the filter’s impulse response. Analyzing Eqn. 4, it should be clear that the BIBO stability criterion will only be satisfied if the system’s poles lie inside the unit circle, since the system’s ROC (region of convergence) must include the unit circle. Consequently, it is sufficient to say that a bounded input signal will always produce a bounded output signal if all the poles lie inside the unit circle.
The zeros on the other hand, are not constrained by this requirement, and as a consequence may lie anywhere on z-plane, since they do not directly affect system stability. Therefore, a system stability analysis may be undertaken by firstly calculating the roots of the transfer function (i.e., roots of the numerator and denominator polynomials) and then plotting the corresponding poles and zeros upon the z-plane.
Applying the developed logic to the poles of an IIR filter, we now arrive at a very important conclusion on why IIR filters cannot have linear phase.
A BIBO stable filter must have its poles within the unit circle, and as such in order to get linear phase, an IIR would need conjugate reciprocal poles outside of the unit circle, making it BIBO unstable.
Based upon this statement, it would seem that it’s not possible to design an IIR to have linear phase. However, a discussed below, phase equalisation filters can be used to linearise the passband phase response.
Phase linearisation with all-pass filters
All-pass phase linearisation filters (equalisers) are a well-established method of altering a filter’s phase response while not affecting its magnitude response. A second order (Biquad) all-pass filter is defined as:
Where, \(\small f_c\) is the centre frequency, \(\small r\) is radius of the poles and \(\small f_s\) is the sampling frequency. Notice how the numerator and denominator coefficients are arranged as a mirror image pair of one another. The mirror image property is what gives the all-pass filter its desirable property, namely allowing the designer to alter the phase response while keeping the magnitude response constant or flat over the complete frequency spectrum.
Cascading an APF (all-pass filter) equalisation cascade (comprised of multiple APFs) with an IIR filter, the basic idea is that we only need to linearise the phase response the passband region. The other regions, such as the transition band and stopband may be ignored, as any non-linearities in these regions are of little interest to the overall filtering result.
The challenge
The APF cascade sounds like an ideal compromise for this challenge, but in truth a significant amount of time and very careful fine-tuning of the APF positions is required in order to achieve an acceptable result. Each APF has two variables: \(\small f_c\) and \(\small r\) that need to be optimised, which complicates the solution. This is further complicated by the fact that the more APF stages that are added to the cascade, the higher the overall filter’s group delay (latency) becomes. This latter issue may become problematic for fast real-time closed loop control systems that rely on an IIR’s low latency property.
Nevertheless, despite these challenges, the APF equaliser is a good compromise for linearising an IIRs passband phase characteristics.
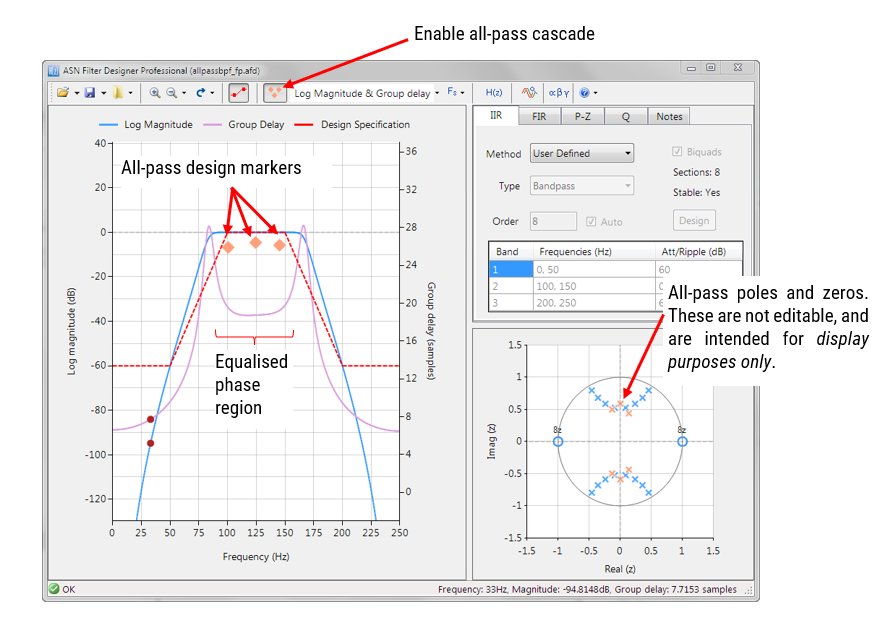
The APF equaliser
ASN Filter Designer provides designers with a very simple to use graphical all-phase equaliser interface for linearising the passband phase of IIR filters. As seen below, the interface is very intuitive, and allows designers to quickly place and fine-tune APF filters positions with the mouse. The tool automatically calculates \(\small f_c\) and \(\small r\), based on the marker position.
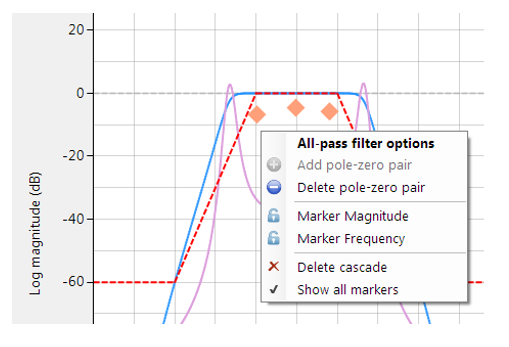
Right clicking on the frequency response chart or on an existing all-pass design marker displays an options menu, as shown on the left.
You may add up to 10 biquads (professional version only).
An IIR with linear passband phase
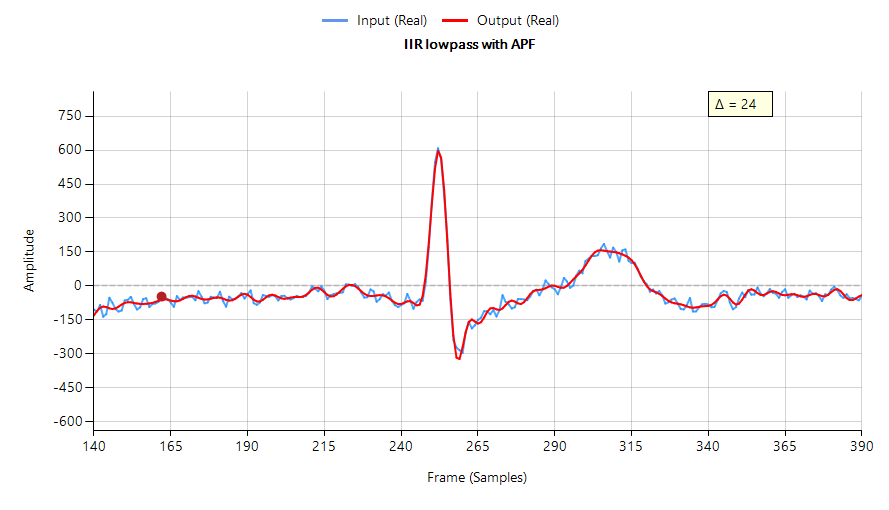
Designing an equaliser composed of three APF pairs, and cascading it with the Chebyshev filter of Figure 1, we obtain a filter waveform that has a much a sharper peak with less attenuation and oscillation than the original IIR – see below. However, this improvement comes at the expense of three extra Biquad filters (the APF cascade) and an increased group delay, which has now risen to 24 samples compared with the original 10 samples.
IIR lowpass filtering result with three APF phase equalisation filters (minimal phase distortion)
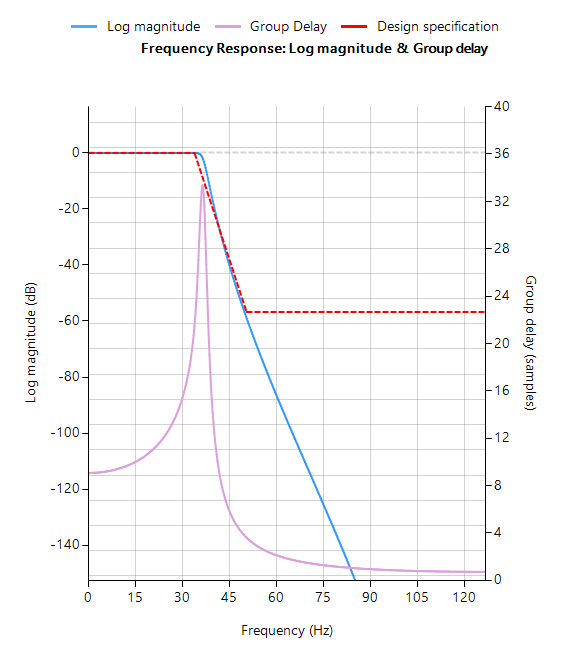
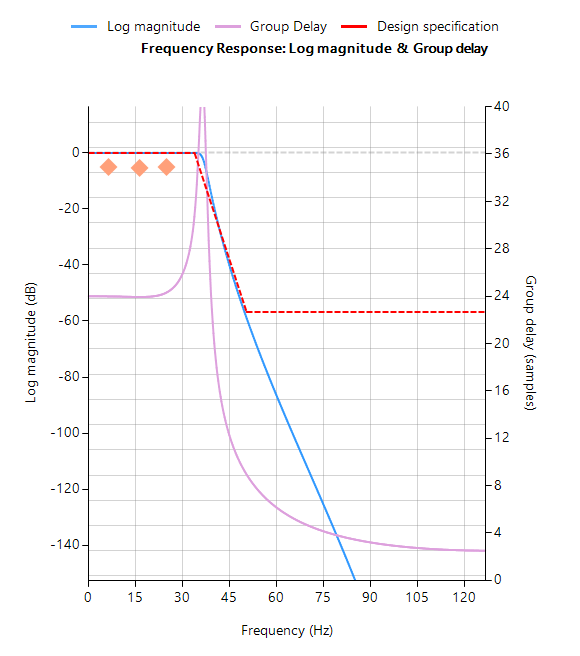
The frequency response of both the original IIR and the equalised IIR are shown below, where the group delay (shown in purple) is the average delay of the filter and is a simpler way of assessing linearity.
IIR without equalisation cascade
IIR with equalisation cascade
Notice that the group delay of the equalised IIR passband (shown on the right) is almost flat, confirming that the phase is indeed linear.
Automatic code generation to Arm processor cores via CMSIS-DSP
The ASN Filter Designer’s automatic code generation engine facilitates the export of a designed filter to Cortex-M Arm based processors via the CMSIS-DSP software framework. The tool’s built-in analytics and help functions assist the designer in successfully configuring the design for deployment.
Before generating the code, the IIR and equalisation filters (i.e. H1 and Heq filters) need to be firstly re-optimised (merged) to an H1 filter (main filter) structure for deployment. The options menu can be found under the P-Z tab in the main UI.
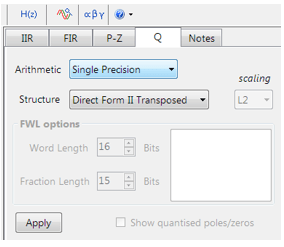
All floating point IIR filters designs should be based on Single Precision arithmetic and either a Direct Form I or Direct Form II Transposed filter structure, as this is supported by a hardware multiplier in the M4F, M7F, M33F and M55F cores. Although you may choose Double Precision, hardware support is only available in some M7F and M55F Helium devices. The Direct Form II Transposed structure is advocated for floating point implementation by virtue of its higher numerically accuracy.
Quantisation and filter structure settings can be found under the Q tab (as shown on the left). Setting Arithmetic to Single Precision and Structure to Direct Form II Transposed and clicking on the Apply button configures the IIR considered herein for the CMSIS-DSP software framework.
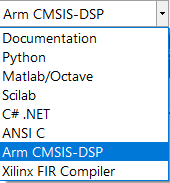
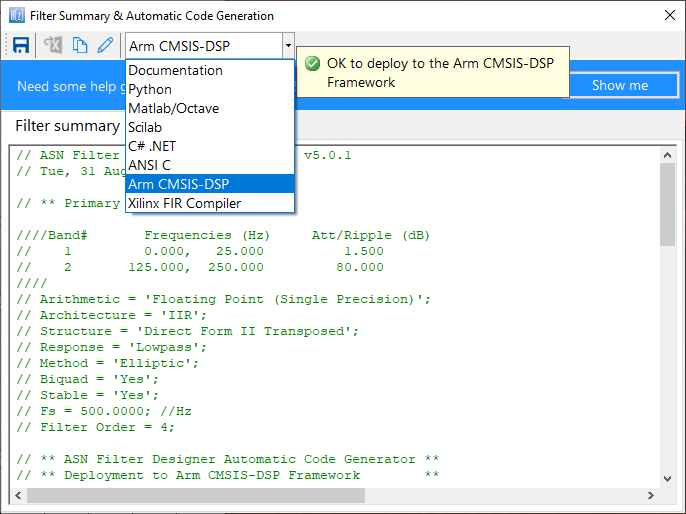
Select the Arm CMSIS-DSP framework from the selection box in the filter summary window:
The automatically generated C code based on the CMSIS-DSP framework for direct implementation on an Arm based Cortex-M processor is shown below:
The ASN Filter Designer’s automatic code generator generates all initialisation code, scaling and data structures needed to implement the linearised filter IIR filter via Arm’s CMSIS-DSP library.
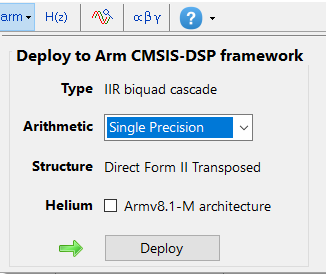
Arm deployment wizard
Professional licence users may expedite the deployment by using the Arm deployment wizard. The built in AI will automatically determine the best settings for your design based on the quantisation settings chosen.
The built in AI automatically analyses your complete filter cascade and converts any H2 or Heq filters into an H1 for implementation.
What we have learnt
The roots of a linear phase digital filter must occur in conjugate reciprocal pairs. Although this no problem for an FIR filter, it becomes infeasible for an IIR filter, as poles would need to be both inside and outside of the unit circle, making the filter BIBO unstable.
The passband phase response of an IIR filter may be linearised by using an APF equalisation cascade. The ASN Filter Designer provides designers with everything they need via a very simple to use, graphical all-pass phase equaliser interface, in order to design a suitable APF cascade by just using the mouse!
The linearised IIR filter may be exported via the automatic code generator using Arm’s optimised CMSIS-DSP library functions for deployment on any Cortex-M microcontroller.
Sanjeev is a RTEI (Real-Time Edge Intelligence) visionary and expert in signals and systems with a track record of successfully developing over 26 commercial products. He is a Distinguished Arm Ambassador and advises top international blue chip companies on their AIoT/RTEI solutions and strategies for I5.0, telemedicine, smart healthcare, smart grids and smart buildings.
Automotive is one of most important sectors in the development of IoT. This interest comes from Industry as Consumers as well. That’s why governments in Europe and elsewhere are supporting these new developments.
Benefits
A longer lifetime for your equipment with Preventive maintenance
Be in control and optimize your processes
Optimize your just-in-time management and get more value by delivering garantuees
Increase security for your cargo and your equipment
A longer lifetime for your equipment with Preventive maintenance
With IoT, you can create new ways of automotive and do more within the same budget. Automotive is an industry which deals with heavy circumstances like dust, wind, heat and pressure. So, it’s important to recognize if the equipment is still working properly. With IoT, you can predict and prevent equipment failure by monitoring product wear and replacement rates. As such, you improve the reliability of your assets and reduce downtime. And if you recognize little faults, you can solve them easily before they have become big and expensive problems.
Be in control and optimise your processes and increase value
On the other hand, you can add value for yourself and for your clients as well by monitor and interconnect your devices. To monitor and control one device in itself (like the development of self-driving cars). But also IoT delivers new possibilities to interconnect automotive in other grids. An example: a smart grid, where an office notices that a visitor will arrive in some minutes and already appoints a parking place to this visitor. By creating a network in which you know which device is on which location, you can optimize your just-in-time management and get more value by being able to deliver guarantees to your clients.
Security
Security has long time being disregarded, but is becoming one of the more important issues in Automotive. And with reason: think about the hack on harbour terminals
Competition on costs is ever increasing. Meanwhile, customers are more demanding in their expectations. In 2024, global smart sensor market will have a value of $80 billion. In others words: become part of the future or become obsolete!
Challenges Asset Managers
Asset managers are faced with the following challenges:
Asset managers demand huge cost savings
Tightening of budgets for maintenance programmes
Less service disruptions and customer complaints
Increasing demands from users
No Control and optimal use of my assets
Risk of hacking by terrorists
Remote firmware updates
With IoT, you can give your equipment a longer lifetime and thus save on repair and replacement costs.
Your customers will become more satisfied with your services. With solutions which weren’t possible until now, products can ‘think’ for their users. Like: the health of the lamp and power quality of street lights, refrigerators which will signal to a car that owner is out of milk, a space on a parking lot is reserved for the visitor when he’s close to the office etcetera.
And the other way around: remember the first time you went in a hotel which had Wi-Fi and you thought: “great”! You’ve probably forgotten; nowadays, not having Wi-Fi has since long became a standard. In IOT, users raise the expectations and will be dissatisfied with devices which do not help them.
A dashboard helps you to view in one glance which assets are working properly and which are probably in need of repair or replacement. Further, you learn when, where and how intensely your assets are being used, so you use your assets more efficiently.
In a world of connected devices, security is very important. Hackers will try to break in: to steal, to cause harm or to shut down your devices. Without security, hackers can make their entry from anywhere: from one of your devices, but also an unsecured device from one of your employee’s at home. So, in the world of IOT, security of these devices is key.
The global smart sensor market size is projected to grow from USD 36.6 billion in 2020 to USD 87.6 billion by 2025, at a CAGR of 19.0%. At least 80% of these IoT/IIoT smart sensors (temperature, pressure, gas, image, motion, loadcells) will use Arm’s Cortex-M technology.
IoT sensor measurement challenge
The challenge for most, is that many sensors used in these applications require filtering in order to clean the measurement data in order to make it useful for analysis.
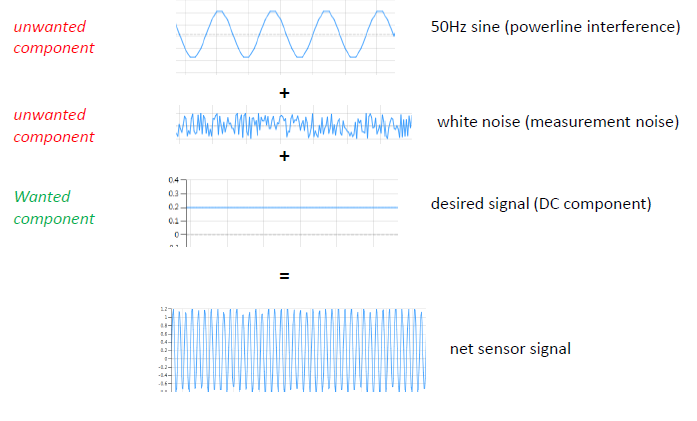
Let’s have a look at what sensor data really is…. All sensors produce measurement data. These measurement data contain two types of components:
Wanted components, i.e. information what we want to know
Unwanted components, measurement noise, 50/60Hz powerline interference, glitches etc – what we don’t want to know
Unwanted components degrade system performance and need to be removed.
So, how do we do it?
DSP means Digital Signal Processing and is a mathematical recipe (algorithm) that can be applied to IoT sensor measurement data in order to clean it and make it useful for analysis.
But that’s not all! DSP algorithms can also help:
In analysing data, producing more accurate results for decision making with ML (machine learning)
They can also improve overall system performance with existing hardware. So ther’s no need to redesign your hardware: a massive cost saving!
To reduce the data sent off to the cloud by pre-analysing data. So send only the data which is necessary
Nevertheless, DSP has been considered by most to be a black art, limited only to those with a strong academic mathematical background. However, for many IoT/IIoT applications, DSP has been become a must in order to remain competitive and obtain high performance with relatively low cost hardware.
Do you have an example?
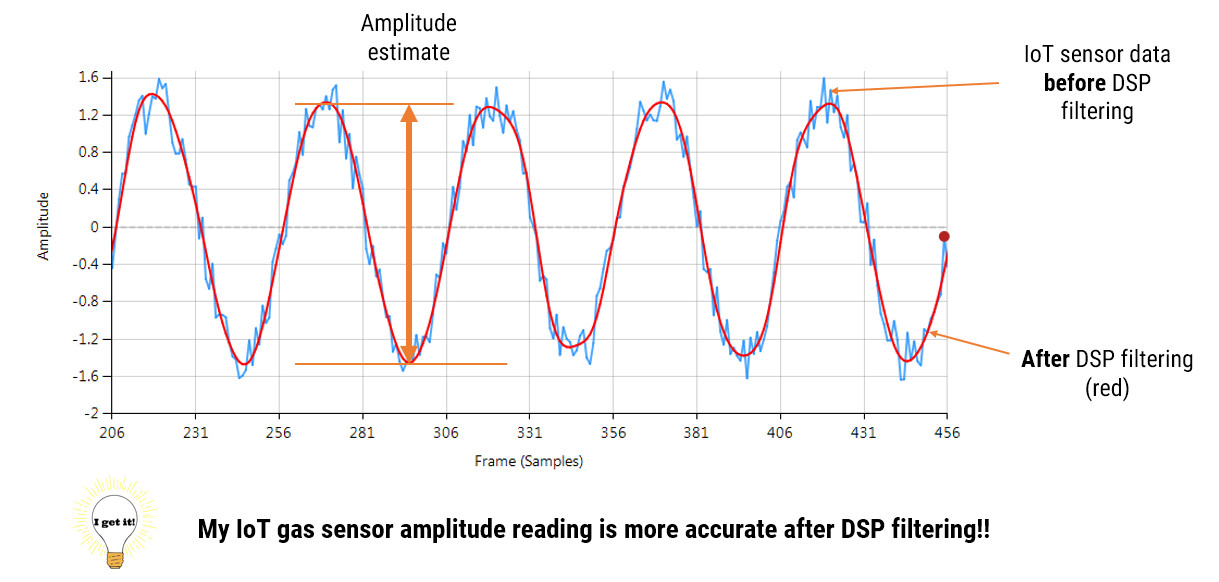
Consider the following application for gas sensor measurement (see the figure below). The requirement is to determine the amplitude of the sinusoid in order to get an estimate of gas concentration (bigger amplitude, more gas concentration etc). Analysing the figure, it is seen that the sinusoid is corrupted with measurement noise (shown in blue), and any estimate based on the blue signal will have a high degree of uncertainty about it – which is not very useful if getting an accurate reading of gas concentration!
Algorithms clean the sensor data
After ‘cleaning’ the sinusoid (red line) with a DSP filtering algorithm, we obtain a much more accurate and usable signal. Now we are able to estimate the amplitude/gas concentration. Notice how easy it is to determine the amplitude of red line.
This is only a snippet of what is possible with DSP algorithms for IoT/IIoT applications, but it should give you a good idea as to the possibilities of DSP.
How do I use this in my IoT application?
As mentioned at the beginning of this article, 80% of IoT smart sensor devices are deployed on Arm’s Cortex-M technology. The Arm Cortex-M4 is a very popular choice with hundreds of silicon vendors, as it offers DSP functionality traditionally found in more expensive DSPs. Arm and its partners provide developers with easy to use tooling and a free software framework (CMSIS-DSP). So, you’ll be up and running within minutes.
A digital filter is a mathematical algorithm that operates on a digital dataset (e.g. sensor data) in order extract information of interest and remove any unwanted information. Applications of this type of technology, include removing glitches from sensor data or even cleaning up noise on a measured signal for easier data analysis. But how do we choose the best type of digital filter for our application? And what are the differences between an IIR filter and an FIR filter?
Digital filters are divided into the following two categories:
Infinite impulse response (IIR)
Finite impulse response (FIR)
As the names suggest, each type of filter is categorised by the length of its impulse response. However, before beginning with a detailed mathematical analysis, it is prudent to appreciate the differences in performance and characteristics of each type of filter.
Example
In order to illustrate the differences between an IIR and FIR, the frequency response of a 14th order FIR (solid line), and a 4th order Chebyshev Type I IIR (dashed line) is shown below in Figure 1. Notice that although the magnitude spectra have a similar degree of attenuation, the phase spectrum of the IIR filter is non-linear in the passband (\(\small 0\rightarrow7.5Hz\)), and becomes very non-linear at the cut-off frequency, \(\small f_c=7.5Hz\). Also notice that the FIR requires a higher number of coefficients (15 vs the IIR’s 10) to match the attenuation characteristics of the IIR.
Figure 1:FIR vs IIR: frequency response of a 14th order FIR (solid line), and a 4th order Chebyshev Type I IIR (dashed line)
These are just some of the differences between the two types of filters. A detailed summary of the main advantages and disadvantages of each type of filter will now follow.
IIR filters
IIR (infinite impulse response) filters are generally chosen for applications where linear phase is not too important and memory is limited. They have been widely deployed in audio equalisation, biomedical sensor signal processing, IoT/IIoT smart sensors and high-speed telecommunication/RF applications.
Advantages
Low implementation cost: requires less coefficients and memory than FIR filters in order to satisfy a similar set of specifications, i.e., cut-off frequency and stopband attenuation.
Low latency: suitable for real-time control and very high-speed RF applications by virtue of the low number of coefficients.
Analog equivalent: May be used for mimicking the characteristics of analog filters using s-z plane mapping transforms.
Disadvantages
Non-linear phase characteristics: The phase charactersitics of an IIR filter are generally nonlinear, especially near the cut-off frequencies. All-pass equalisation filters can be used in order to improve the passband phase characteristics.
More detailed analysis: Requires more scaling and numeric overflow analysis when implemented in fixed point. The Direct form II filter structure is especially sensitive to the effects of quantisation, and requires special care during the design phase.
Numerical stability: Less numerically stable than their FIR (finite impulse response) counterparts, due to the feedback paths.
FIR filters
FIR (finite impulse response) filters are generally chosen for applications where linear phase is important and a decent amount of memory and computational performance are available. They have a widely deployed in audio and biomedical signal enhancement applications. Their all-zero structure (discussed below) ensures that they never become unstable for any type of input signal, which gives them a distinct advantage over the IIR.
Advantages
Linear phase: FIRs can be easily designed to have linear phase. This means that no phase distortion is introduced into the signal to be filtered, as all frequencies are shifted in time by the same amount – thus maintaining their relative harmonic relationships (i.e. constant group and phase delay). This is certainly not case with IIR filters, that have a non-linear phase characteristic.
Stability: As FIRs do not use previous output values to compute their present output, i.e. they have no feedback, they can never become unstable for any type of input signal, which is gives them a distinct advantage over IIR filters.
Arbitrary frequency response: The Parks-McClellan and ASN FilterScript’s firarb() function allow for the design of an FIR with an arbitrary magnitude response. This means that an FIR can be customised more easily than an IIR.
Fixed point performance: the effects of quantisation are less severe than that of an IIR.
Disadvantages
High computational and memory requirement: FIRs usually require many more coefficients for achieving a sharp cut-off than their IIR counterparts. The consequence of this is that they require much more memory and significantly a higher amount of MAC (multiple and accumulate) operations. However, modern microcontroller architectures based on the Arm’s Cortex-M cores now include DSP hardware support via SIMD (signal instruction, multiple data) that expedite the filtering operation significantly.
Higher latency: the higher number of coefficients, means that in general a linear phase FIR is less suitable than an IIR for fast high throughput applications. This becomes problematic for real-time closed-loop control applications, where a linear phase FIR filter may have too much group delay to achieve loop stability.
Minimum phase filters: A solution to ovecome the inherent N/2 latency (group delay) in a linear filter is to use a so-called minimum phase filter, whereby any zeros outside of the unit circle are moved to their conjugate reciprocal locations inside the unit circle. The result of thezero flipping operation is that the magnitude spectrum will be identical to the original filter, and the phase will be nonlinear, but most importantly the latency will be reduced from N/2 to something much smaller (although non-constant), making it suitable for real-time control applications. For applications where phase is less important, this may sound ideal, but the difficulty arises in the numerical accuracy of the root-finding algorithm when dealing with large polynomials. Therefore, orders of 50 or 60 should be considered a maximum when using this approach. Although other methods do exist (e.g. the Complex Cepstrum), transforming higher-order linear phase FIRs to their minimum phase cousins remains a challenging task.
No analog equivalent: using the Bilinear, matched z-transform (s-z mapping), an analog filter can be easily be transformed into an equivalent IIR filter. However, this is not possible for an FIR as it has no analog equivalent.
Mathematical definitions
As discussed in the introduction, the name IIR and FIR originate from the mathematical definitions of each type of filter, i.e. an IIR filter is categorised by its theoretically infinite impulse response,
Practically speaking, it is not possible to compute the output of an IIR using this equation. Therefore, the equation may be re-written in terms of a finite number of poles \(\small p\) and zeros \(\small q\), as defined by the linear constant coefficient difference equation given by:
where, \(\small a_k\) and \(\small b_k\) are the filter’s denominator and numerator polynomial coefficients, who’s roots are equal to the filter’s poles and zeros respectively. Thus, a relationship between the difference equation and the z-transform (transfer function) may therefore be defined by using the z-transform delay property such that,
As seen, the transfer function is a frequency domain representation of the filter. Notice also that the poles act on the outputdata, and the zeros on the inputdata. Since the poles act on the output data, and affect stability, it is essential that their radii remain inside the unit circle (i.e. <1) for BIBO (bounded input, bounded output) stability. The radii of the zeros are less critical, as they do not affect filter stability. This is the primary reason why all-zero FIR (finite impulse response) filters are always stable.
BIBO stability
A linear time invariant (LTI) system (such as a digital filter) is said to be bounded input, bounded output stable, or BIBO stable, if every bounded input gives rise to a bounded output, as
Where, \(\small h(k)\) is the LTI system’s impulse response. Analyzing this equation, it should be clear that the BIBO stability criterion will only be satisfied if the system’s poles lie inside the unit circle, since the system’s ROC (region of convergence) must include the unit circle. Consequently, it is sufficient to say that a bounded input signal will always produce a bounded output signal if all the poles lie inside the unit circle.
The zeros on the other hand, are not constrained by this requirement, and as a consequence may lie anywhere on z-plane, since they do not directly affect system stability. Therefore, a system stability analysis may be undertaken by firstly calculating the roots of the transfer function (i.e., roots of the numerator and denominator polynomials) and then plotting the corresponding poles and zeros upon the z-plane.
An interesting situation arises if any poles lie on the unit circle, since the system is said to be marginally stable, as it is neither stable or unstable. Although marginally stable systems are not BIBO stable, they have been exploited by digital oscillator designers, since their impulse response provides a simple method of generating sine waves, which have proved to be invaluable in the field of telecommunications.
Biquad IIR filters
The IIR filter implementation discussed herein is said to be biquad, since it has two poles and two zeros as illustrated below in Figure 2. The biquad implementation is particularly useful for fixed point implementations, as the effects of quantization and numerical stability are minimised. However, the overall success of any biquad implementation is dependent upon the available number precision, which must be sufficient enough in order to ensure that the quantised poles are always inside the unit circle.
Figure 2: Direct Form I (biquad) IIR filter realization and transfer function.
Analysing Figure 2, it can be seen that the biquad structure is actually comprised of two feedback paths (scaled by \(\small a_1\) and \(\small a_2\)), three feed forward paths (scaled by \(\small b_0, b_1\) and \(\small b_2\)) and a section gain, \(\small K\). Thus, the filtering operation of Figure 1 can be summarised by the following simple recursive equation:
Analysing the equation, notice that the biquad implementation only requires four additions (requiring only one accumulator) and five multiplications, which can be easily accommodated on any Cortex-M microcontroller. The section gain, \(\small K\) may also be pre-multiplied with the forward path coefficients before implementation.
A collection of Biquad filters is referred to as a Biquad Cascade, as illustrated below.
The ASN Filter Designer can design and implement a cascade of up to 50 biquads (Professional edition only).
Floating point implementation
When implementing a filter in floating point (i.e. using double or single precision arithmetic) Direct Form II structures are considered to be a better choice than the Direct Form I structure. The Direct Form II Transposed structure is considered the most numerically accurate for floating point implementation, as the undesirable effects of numerical swamping are minimised as seen by analysing the difference equations.
Figure 3 – Direct Form II Transposed strucutre, transfer function and difference equations
The filter summary (shown in Figure 4) provides the designer with a detailed overview of the designed filter, including a detailed summary of the technical specifications and the filter coefficients, which presents a quick and simple route to documenting your design.
The ASN Filter Designer supports the design and implementation of both single section and Biquad (default setting) IIR filters.
Figure 4: detailed specification.
FIR definition
Returning the IIR’s linear constant coefficient difference equation, i.e.
Notice that when we set the \(\small a_k\) coefficients (i.e. the feedback) to zero, the definition reduces to our original the FIR filter definition, meaning that the FIR computation is just based on past and present inputs values, namely:
\(\displaystyle
y(n)=\sum_{k=0}^{q}b_kx(n-k)
\)
Implementation
Although several practical implementations for FIRs exist, the direct formstructure and its transposed cousin are perhaps the most commonly used, and as such, all designed filter coefficients are intended for implementation in a Direct form structure.
The Direct form structure and associated difference equation are shown below. The Direct Form is advocated for fixed point implementation by virtue of the single accumulator concept.
The recommended (default) structure within the ASN Filter Designer is the Direct Form Transposed structure, as this offers superior numerical accuracy when using floating point arithmetic. This can be readily seen by analysing the difference equations below (used for implementation), as the undesirable effects of numerical swamping are minimised, since floating point addition is performed on numbers of similar magnitude.
Implementing your filter on an Arm Cortex-M processor
Although a few processor technologies exist for microcontrollers (e.g. RISC-V, Xtensa, MIPS), over 90% of the microcontrollers used in the smart product market are powered by so-called Arm Cortex-M processors that offer a combination of high algorithmic performance, low-power and security. The Arm Cortex-M4 is a very popular choice with several silicon vendors (including ST, TI, NXP, ADI, Nordic, Microchip, Renesas), as it offers DSP (digital signal processing) functionality traditionally found in more expensive devices and is low-power.
Filtering libraries and support
Arm and ASN provide developers with extensive easy-to-use tooling and tried and tested software libraries used internationally by tens of thousands of developers.
The Arm CMSIS-DSP software framework is interesting as it provides IoT developers with a rich collection of fast mathematical and vector functions, interpolation functions, digital filtering (FIR/IIR) and adaptive filtering (LMS) functions, motor control functions (e.g. PID controller), complex math functions and supports various data types, including fixed and floating point. The important point to make here is that all of these functions have been optimised for Arm Cortex-M processors, allowing you to focus on your application rather than worrying about optimisation.
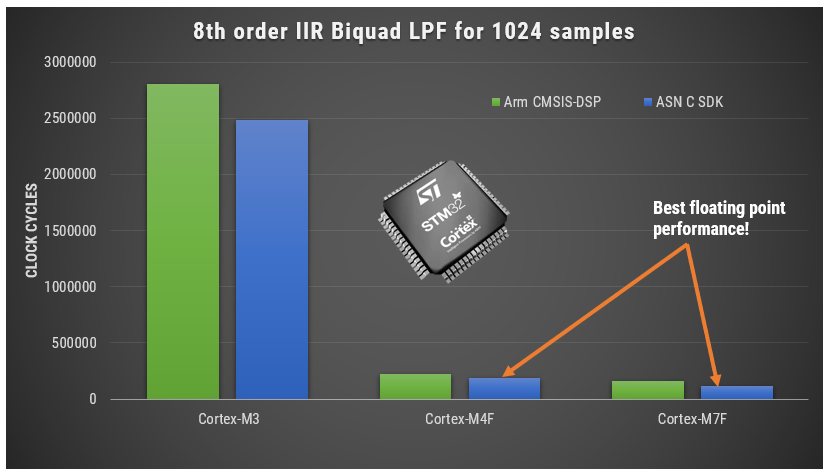
Despite the broad functionality, the CMSIS-DSP library is somewhat limited for filters, so the flexible ASN DSP filtering library can be used instead, which supports the higher numerical accuracy Direct Form Transposed FIR filter structure and single section IIR filters. A benchmark of ASN’s floating point application-specific DSP filtering library versus Arm’s CMSIS-DSP library is shown below for three types of Arm cores.
Framework Benchmarks: lower number of clock cycles means higher performance.
As seen, the performance of the ASN library is slightly faster by virtue of the application-specific nature of the implementation. The C code is automatically generated from the ASN Filter Designer tool.
What have we learned?
Digital filters are divided into the following two categories:
Infinite impulse response (IIR)
Finite impulse response (FIR)
IIR (infinite impulse response) filters are generally chosen for applications where linear phase is not too important and memory is limited. They have been widely deployed in audio equalisation, biomedical sensor signal processing, IoT/AIoT smart sensors and high-speed telecommunication/RF applications.
FIR (finite impulse response) filters are generally chosen for applications where linear phase is important and a decent amount of memory and computational performance are available. They have a widely deployed in audio and biomedical signal enhancement applications.
ASN Filter Designer provides engineers with everything they need to design, experiment and deploy complex IIR and FIR digital filters for a variety of IoT sensor measurement applications. These advantages coupled with automatic C code generation with ASN’s DSP filtering library functionality allow engineers to design, validate and then deploy their designs to an Arm Cortex-M processor within hours rather than more traditional routes that could take days.
Sanjeev is a RTEI (Real-Time Edge Intelligence) visionary and expert in signals and systems with a track record of successfully developing over 26 commercial products. He is a Distinguished Arm Ambassador and advises top international blue chip companies on their AIoT/RTEI solutions and strategies for I5.0, telemedicine, smart healthcare, smart grids and smart buildings.
https://www.advsolned.com/wp-content/uploads/2020/04/fir_iir.png453622Dr. Sanjeev Sarpalhttps://www.advsolned.com/wp-content/uploads/2021/07/asn_logo_red_met_tekst_helder-e1755353934770.pngDr. Sanjeev Sarpal2020-04-28 13:35:442024-12-05 11:32:35Difference between IIR and FIR filters: a practical design guide